DAT Benchmark
收藏arXiv2024-12-01 更新2024-12-06 收录
下载链接:
https://dat-benchmark.framer.website/
下载链接
链接失效反馈官方服务:
资源简介:
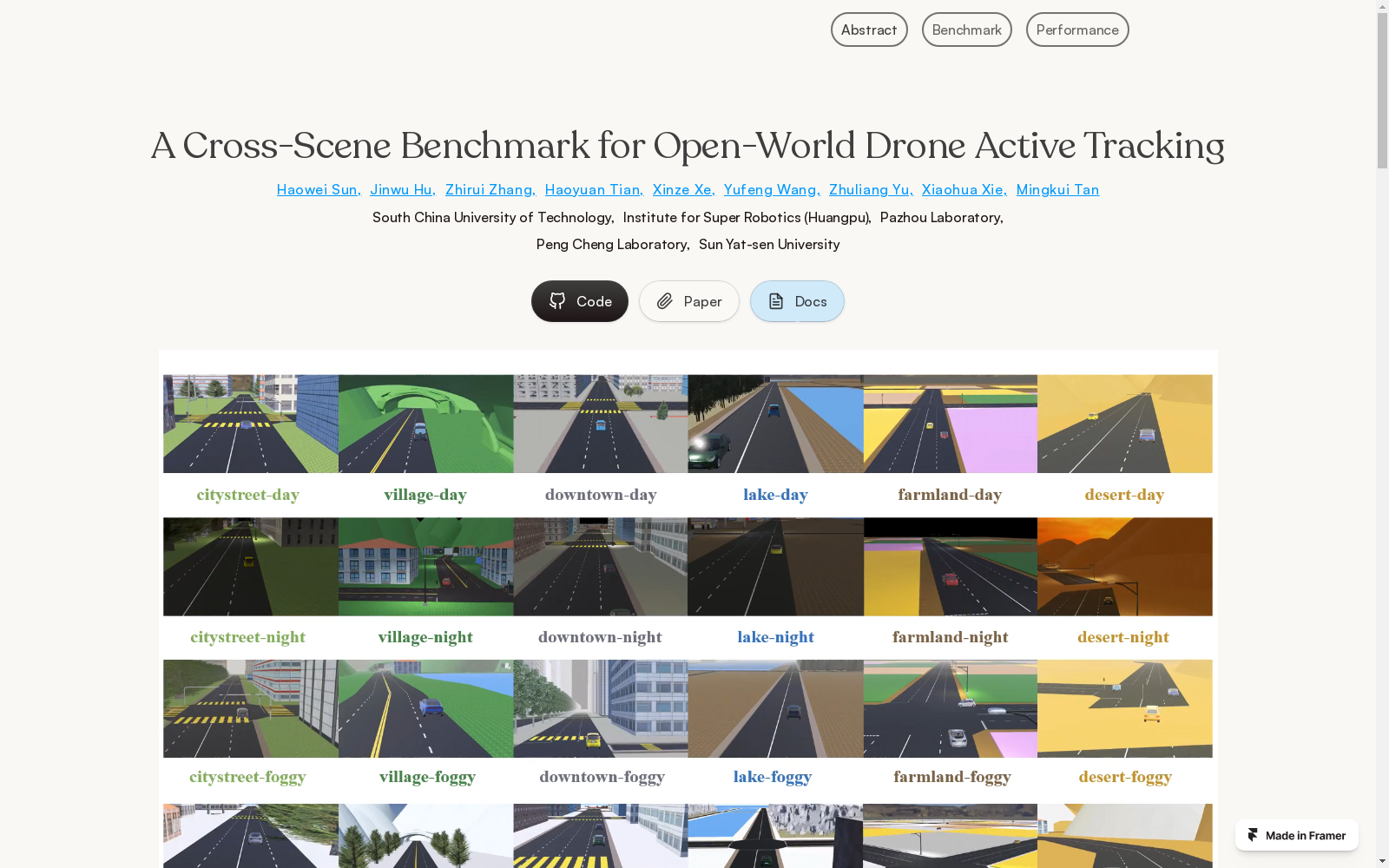
DAT Benchmark是由华南理工大学创建的一个用于开放世界无人机主动跟踪的跨场景基准数据集。该数据集包含24个视觉复杂的场景,涵盖了城市街道、乡村、市中心、湖泊、农田和沙漠等多种环境,以及白天、夜晚、雾天和雪天四种天气条件。数据集的创建过程模拟了真实世界的多样性和复杂性,通过高保真建模和多样化传感器数据,提供了全面的跟踪场景支持。DAT Benchmark主要应用于无人机目标跟踪和安全监控领域,旨在解决在动态环境中准确跟踪目标的挑战。
DAT Benchmark is a cross-scenario benchmark dataset for open-world unmanned aerial vehicle (UAV) active tracking, developed by South China University of Technology. This dataset contains 24 visually complex scenarios, covering various environments such as urban streets, villages, downtown areas, lakes, farmlands and deserts, as well as four weather conditions including daytime, nighttime, foggy and snowy days. The dataset creation process simulates the diversity and complexity of the real world, providing comprehensive support for tracking scenarios through high-fidelity modeling and diverse sensor data. DAT Benchmark is mainly applied in the fields of UAV target tracking and security monitoring, aiming to address the challenge of accurately tracking targets in dynamic environments.
提供机构:
华南理工大学
创建时间:
2024-12-01
搜集汇总
数据集介绍
构建方式
DAT Benchmark的构建方式体现了对无人机主动跟踪任务复杂性和多样性的深刻理解。该数据集通过模拟6种不同的环境(城市街道、乡村、市中心、湖泊、农田和沙漠)以及4种天气条件(白天、夜晚、雾天和雪天),共计24个视觉复杂的场景,以评估算法在跨场景和跨领域任务中的泛化能力。DAT Benchmark利用Webots模拟软件进行高保真度的机器人动力学建模,并结合SUMO交通模拟器来管理目标行为,确保了目标路径的多样性和高效性,从而超越了传统的基于规则的路径生成方法。
特点
DAT Benchmark的显著特点在于其场景的多样性和复杂性,以及对真实世界条件的精确模拟。该数据集不仅涵盖了多种环境类型和天气条件,还提供了2种跟踪器类型(无人机和地面机器人)、24种目标类型和6种不同的传感器类型,支持自定义机器人模型和控制器的即插即用接口。此外,DAT Benchmark通过高保真度的模拟,确保了机器人运动、碰撞和交互的准确性,为评估跟踪算法在复杂场景中的表现提供了坚实的基础。
使用方法
DAT Benchmark的使用方法灵活多样,适用于各种强化学习算法的开发和评估。用户可以通过Python类封装的场景、任务和数据增强模块,快速配置和启动训练环境。DAT Benchmark支持异步强化学习算法(如A3C)、Gymnasium接口(如Stable-Baselines3和Tianshou)以及并行执行环境(如PPO和SAC)。此外,通过JSON配置文件,用户可以方便地自定义场景选择、跟踪器和目标配置、SUMO参数以及任务附加参数,极大地提升了数据集的实用性和扩展性。
背景与挑战
背景概述
DAT Benchmark,由华南理工大学、超级机器人研究所(黄埔)、琶洲实验室、鹏城实验室和中山大学共同开发,旨在为开放世界无人机主动跟踪任务提供一个统一的跨场景跨领域基准。该数据集创建于2024年,主要研究人员包括Haowei Sun、Jinwu Hu、Zhirui Zhang等。其核心研究问题是如何在复杂和动态环境中实现精确的无人机视觉主动跟踪,通过强化学习方法解决缺乏统一基准、开放世界环境复杂干扰以及动态目标多样运动行为的问题。DAT Benchmark的推出对无人机视觉跟踪领域具有重要影响力,为算法评估提供了丰富的视觉复杂环境和真实机器人动力学建模。
当前挑战
DAT Benchmark在构建过程中面临多重挑战。首先,解决领域问题是其核心挑战之一,即如何在开放世界环境中实现无人机对目标的精确跟踪。其次,构建过程中遇到的挑战包括缺乏统一基准,现有基准场景有限、复杂度低且数量少,无法充分验证代理性能。此外,开放世界跟踪涉及广阔动态环境,频繁干扰给代理准确跟随目标带来显著挑战。最后,开放世界目标表现出复杂、不可预测的行为,要求代理适应多样运动和方向,现有方法假设固定前视视角,导致奖励函数无法准确反映不同行为和视角下的跟踪性能。
常用场景
经典使用场景
DAT Benchmark 在无人机主动视觉跟踪领域中扮演着重要角色,其经典使用场景主要集中在复杂环境下的目标跟踪任务。该数据集提供了24个视觉复杂的环境,涵盖了城市街道、乡村、市中心、湖泊、农田和沙漠等多种场景,以及白天、夜晚、雾天和雪天四种天气条件。这些多样化的环境设置使得DAT Benchmark成为评估算法在跨场景和跨领域泛化能力的理想平台。研究人员可以利用该数据集训练和测试无人机在不同环境中的跟踪性能,从而推动无人机视觉跟踪技术的发展。
实际应用
DAT Benchmark 在实际应用中具有广泛的前景,特别是在无人机目标跟踪和安全监控领域。例如,在城市搜索和救援任务中,无人机需要能够在复杂的城市环境中准确跟踪目标,DAT Benchmark 提供的多样化场景和天气条件能够有效训练和评估无人机的跟踪能力。此外,在农业监测、野生动物保护和灾害响应等领域,DAT Benchmark 也能够为无人机的自主跟踪系统提供可靠的训练数据和评估标准,从而提升其实际应用效果。
衍生相关工作
DAT Benchmark 的提出催生了一系列相关研究工作,特别是在无人机视觉主动跟踪和强化学习领域。例如,基于DAT Benchmark,研究人员提出了多种强化学习算法,如R-VAT,用于提升无人机在复杂场景中的跟踪性能。此外,DAT Benchmark 还促进了跨场景和跨领域泛化能力的研究,推动了多智能体强化学习和模拟到现实部署等方向的发展。这些相关工作不仅丰富了无人机视觉跟踪的理论研究,也为实际应用提供了技术支持。
以上内容由遇见数据集搜集并总结生成


