Columbia PushT Dataset
收藏diffusion-policy.cs.columbia.edu2025-03-21 收录
下载链接:
https://diffusion-policy.cs.columbia.edu/
下载链接
链接失效反馈官方服务:
资源简介:
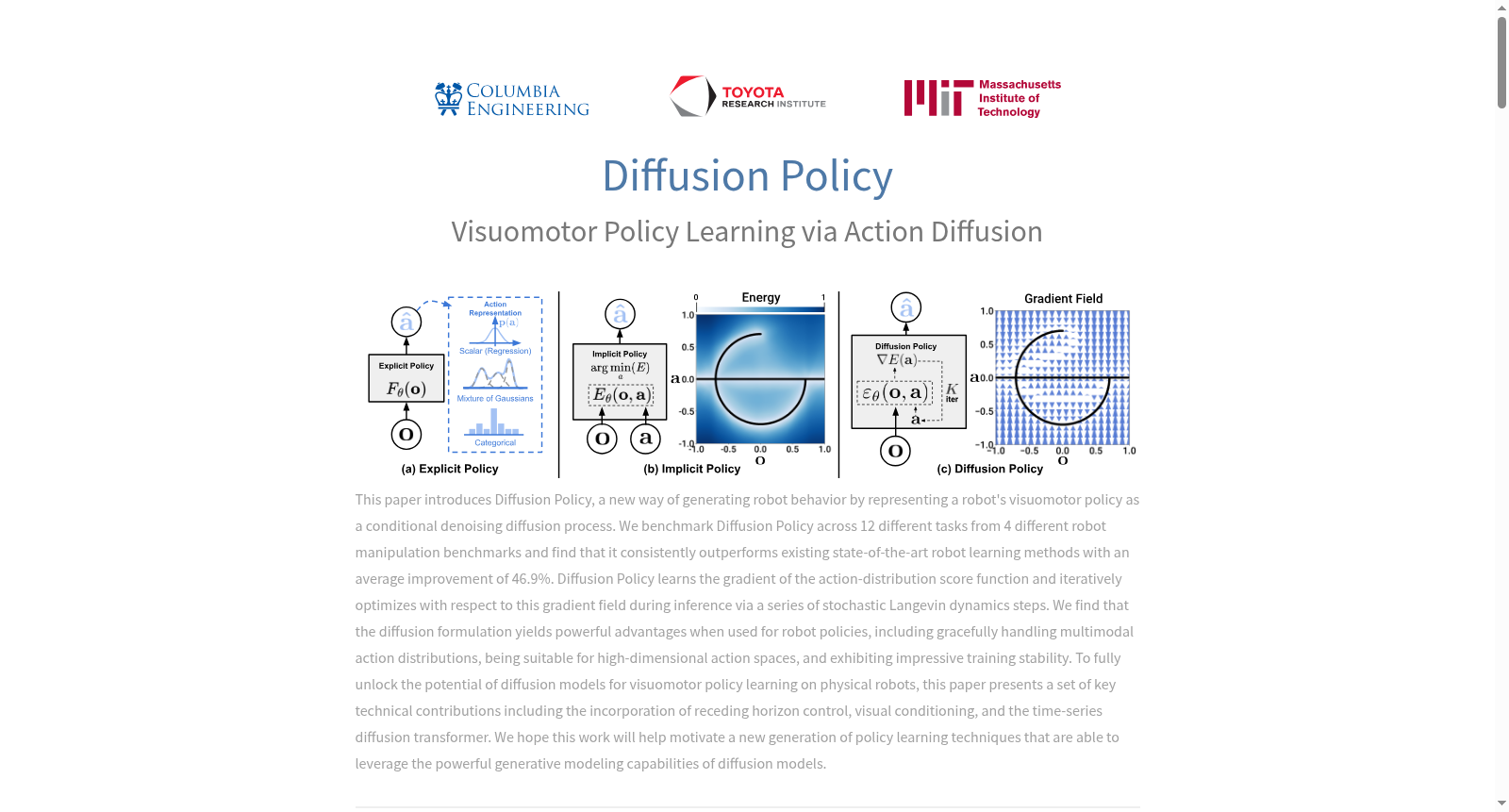
该数据集是由哥伦比亚大学和谷歌团队创建的一个用于机器人视觉运动策略学习的数据集,旨在通过扩散模型生成机器人行为。该数据集包含来自 4 个不同机器人操作基准测试的 15 个任务的演示数据,涵盖模拟和真实环境,涉及 2 到 6 自由度的动作空间,以及刚体和流体物体的操作。数据集内容丰富,包括状态和视觉观测数据,以及人类演示的高质量动作序列。数据集的创建过程结合了高吞吐量的远程操作数据采集和先进的扩散模型技术。通过行为克隆方法,Diffusion Policy 学习将视觉观测映射到动作序列,能够处理多模态动作分布和高维动作空间。该数据集的应用领域广泛,主要用于研究机器人如何通过视觉输入生成精确的动作指令,解决复杂环境中的操作任务,如物体操纵、液体倾倒和多阶段任务等。Diffusion Policy Dataset 的主要贡献在于其创新的扩散模型架构和训练方法,能够显著提升机器人策略学习的性能和稳定性。
This dataset is created by Columbia University and Google teams for robot visual-motor policy learning, aiming to generate robot behaviors via diffusion models. It includes demonstration data for 15 tasks from 4 distinct robot manipulation benchmarks, covering both simulated and real-world environments, involving action spaces of 2 to 6 degrees of freedom (DoF), and manipulation of rigid bodies and fluid objects. The dataset is rich in content, including state and visual observation data, as well as high-quality action sequences from human demonstrations. The dataset creation process combines high-throughput teleoperation data collection and advanced diffusion model techniques. Using behavior cloning methods, Diffusion Policy learns to map visual observations to action sequences, capable of handling multimodal action distributions and high-dimensional action spaces. This dataset has a wide range of applications, primarily used to study how robots generate precise action commands from visual inputs to solve manipulation tasks in complex environments, such as object manipulation, liquid pouring, and multi-stage tasks. The main contributions of the Diffusion Policy Dataset lie in its innovative diffusion model architecture and training methods, which can significantly improve the performance and stability of robot policy learning.
提供机构:
哥伦比亚大学
搜集汇总
数据集介绍
背景与挑战
背景概述
Columbia PushT Dataset是一个用于评估Diffusion Policy在机器人操作任务中性能的数据集,特别关注Push-T任务,该任务要求机器人精确地将T形块推入目标区域并移动到终点区域。数据集展示了Diffusion Policy在多种干扰条件下的鲁棒性和高效性。
以上内容由遇见数据集搜集并总结生成


