Mimicking-Bench
收藏arXiv2024-12-24 更新2024-12-25 收录
下载链接:
https://mimicking-bench.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
Mimicking-Bench是由清华大学、Galbot、上海期智研究院、上海人工智能实验室和北京大学联合创建的一个用于通用化人形机器人与场景交互学习的基准数据集。该数据集包含六个家庭场景中的全身交互任务,涵盖了11,800种不同的物体形状和25,000个人类参考数据。数据集通过整合真实世界和自动合成的交互数据创建,旨在解决人形机器人在复杂场景中通用化技能学习的问题。Mimicking-Bench的应用领域主要集中在机器人技术,特别是人形机器人在家庭场景中的交互任务,旨在提高机器人在真实世界中的任务执行能力。
Mimicking-Bench is a benchmark dataset for general-purpose humanoid robot-scene interaction learning, jointly created by Tsinghua University, Galbot, Shanghai Qi Zhi Institute, Shanghai AI Laboratory, and Peking University. This dataset includes full-body interaction tasks across six household scenarios, covering 11,800 distinct object shapes and 25,000 human reference data samples. It is constructed by integrating real-world and automatically synthesized interaction data, with the aim of addressing the challenge of generalizable skill learning for humanoid robots in complex scenarios. The application scope of Mimicking-Bench primarily focuses on robotics, particularly the interaction tasks of humanoid robots in household environments, with the goal of improving the real-world task execution capabilities of such robots.
提供机构:
清华大学, Galbot, 上海期智研究院, 上海人工智能实验室, 北京大学
创建时间:
2024-12-24
原始信息汇总
Mimicking-Bench 数据集概述
数据集名称
Mimicking-Bench: A Benchmark for Generalizable Humanoid-Scene Interaction Learning via Human Mimicking
数据集简介
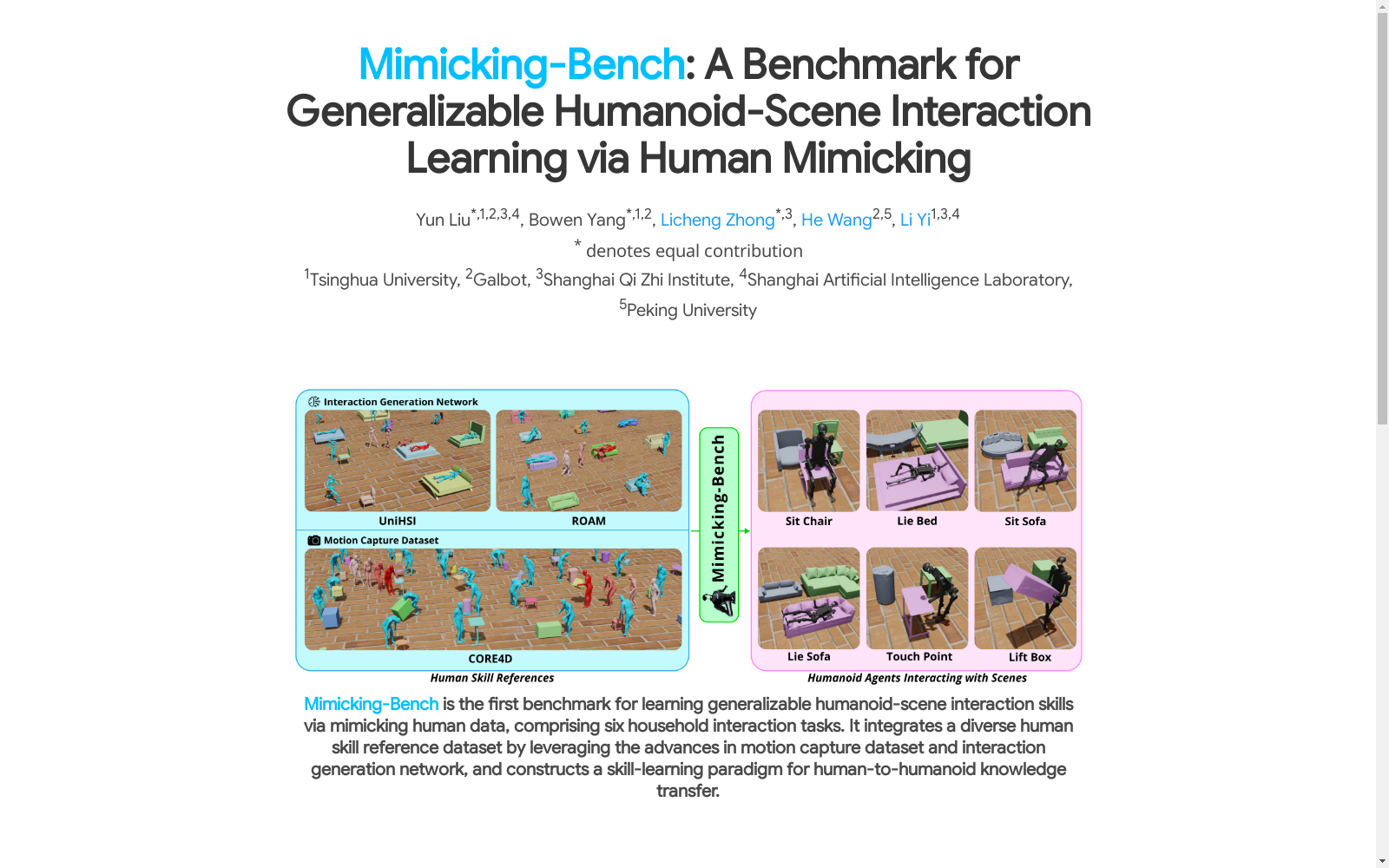
Mimicking-Bench 是一个用于通过模仿人类数据学习可泛化的人形-场景交互技能的基准数据集。该数据集包含了六个家庭场景中的全身体人形-场景交互任务,涵盖了11K种多样化的物体形状,并提供了20K的合成和3K的真实世界人类交互技能参考。
数据集内容
- 任务数量: 6个家庭场景中的全身体人形-场景交互任务。
- 物体形状: 11K种多样化的物体形状。
- 人类交互技能参考: 20K合成数据和3K真实世界数据。
数据集特点
- 首次提出: 这是第一个通过模仿大规模人类动画参考来学习可泛化的人形-场景交互技能的综合基准。
- 技能学习管道: 构建了一个完整的人形技能学习管道,包括运动重定向、运动跟踪、模仿学习及其各种组合。
- 实验验证: 通过广泛的实验,展示了人类模仿在技能学习中的价值,揭示了关键挑战和研究方向。
作者信息
- Yun Liu: Tsinghua University, Shanghai Artificial Intelligence Laboratory
- Bowen Yang: Tsinghua University, Galbot
- Licheng Zhong: Shanghai Qi Zhi Institute
- He Wang: Galbot, Peking University
- Li Yi: Tsinghua University, Shanghai Qi Zhi Institute, Shanghai Artificial Intelligence Laboratory
联系方式
- Yun Liu: yun-liu22@mails.tsinghua.edu.cn
- Bowen Yang: ybw22@mails.tsinghua.edu.cn
- Licheng Zhong: zlicheng.colmar@outlook.com
- Li Yi: ericyi0124@gmail.com
数据集链接
搜集汇总
数据集介绍
构建方式
Mimicking-Bench 数据集通过整合大规模的人类技能参考数据集,构建了一个用于通用化人形机器人与场景交互学习的基准。该数据集利用了运动捕捉数据集和交互生成网络的最新进展,涵盖了六种家庭场景中的全身交互任务,包括坐椅子、躺床、坐沙发、躺沙发、触碰物体和举箱子。数据集通过集成真实世界和自动合成的场景交互数据,提供了23,000个交互动作序列,覆盖了11,000种多样化的物体形状。
使用方法
Mimicking-Bench 数据集可用于评估和开发人形机器人与场景交互的通用化技能学习算法。用户可以通过数据集中的六种交互任务,结合运动重定向、运动跟踪和模仿学习等技术模块,进行算法性能的比较和优化。数据集支持模块化的算法评估,用户可以选择不同的算法组合进行实验,并通过数据集提供的评估指标(如运动学和物理学指标)来衡量算法的成功率和能量消耗。
背景与挑战
背景概述
Mimicking-Bench是由清华大学、Galbot、上海期智研究院、上海人工智能实验室和北京大学联合开发的一个开创性基准数据集,旨在通过模仿人类数据来学习通用的人形机器人与场景交互技能。该数据集于2024年发布,由Yun Liu、Bowen Yang、Licheng Zhong、He Wang和Li Yi等研究人员主导,专注于解决人形机器人在复杂场景中通用交互技能的学习问题。Mimicking-Bench包含了六个家庭场景中的全身交互任务,涵盖了11,000多种不同的物体形状,并整合了23,000个合成和3,000个真实世界的人类交互技能参考数据。该数据集的推出填补了现有方法在场景几何泛化方面的不足,为人形机器人领域的研究提供了重要的基准支持。
当前挑战
Mimicking-Bench的构建面临两大主要挑战:首先是如何收集涵盖广泛物体几何形状的多样化人类技能参考数据;其次是如何在技术层面进一步探索和开发这一范式中的关键技术模块。在数据收集过程中,研究人员利用了动作捕捉技术和交互生成网络,成功整合了大规模的合成和真实世界的人类场景交互数据。此外,数据集的构建还面临技术上的挑战,如如何将人类动作重定向到人形机器人骨骼、如何在物理模拟环境中跟踪技能动画,以及如何通过模仿学习实现人形机器人的技能展示。这些挑战为未来的研究提供了重要的方向和机会。
常用场景
经典使用场景
Mimicking-Bench 数据集最经典的使用场景在于通过模仿人类数据,帮助人形机器人在与场景的交互中学习通用技能。该数据集涵盖了六种家庭场景中的全身交互任务,如坐在椅子上、躺在床上、触摸物体等,这些任务要求机器人能够适应不同的物体几何形状和场景布局。通过结合大规模的人类技能参考数据集和交互生成网络,Mimicking-Bench 提供了一个完整的技能学习流程,支持从人类到人形机器人的知识迁移。
解决学术问题
Mimicking-Bench 数据集解决了现有方法在人形机器人与场景交互学习中的几个关键学术问题。首先,它填补了现有基准数据集在场景几何泛化能力上的不足,提供了多样化的物体形状和交互任务。其次,它通过引入大规模的人类技能参考数据,解决了现有方法在数据规模和多样性上的限制。此外,Mimicking-Bench 还构建了一个完整的技能学习范式,涵盖了运动重定向、运动跟踪和模仿学习等多个技术模块,为研究者提供了一个系统化的研究平台。
实际应用
Mimicking-Bench 数据集在实际应用中具有广泛的前景,特别是在需要人形机器人协助完成复杂任务的场景中。例如,在家庭环境中,机器人可以通过模仿人类的行为来完成诸如整理房间、搬运物品等任务,从而提高效率并减少人工成本。此外,该数据集还可以应用于医疗、救援等领域,帮助机器人学习如何在复杂环境中执行任务,如协助病人移动或进行紧急救援操作。
数据集最近研究
最新研究方向
Mimicking-Bench数据集在人形机器人与场景交互学习领域的前沿研究中,主要聚焦于通过模仿人类数据实现可泛化的人形机器人技能学习。该数据集通过整合大规模的人类动作捕捉数据和交互生成网络,构建了一个包含六种家庭场景交互任务的基准,涵盖了11,000多种物体形状和23,000多条人类交互技能参考。研究者们通过构建一个三阶段的技能学习范式,包括动作重定向、动作跟踪和模仿学习,探索了从人类到人形机器人的知识迁移。该数据集的引入不仅为现有算法提供了标准化的评估平台,还揭示了在不同场景和物体几何变化下的泛化能力挑战,推动了人形机器人技能学习的进一步发展。
相关研究论文
- 1Mimicking-Bench: A Benchmark for Generalizable Humanoid-Scene Interaction Learning via Human Mimicking清华大学, Galbot, 上海期智研究院, 上海人工智能实验室, 北京大学 · 2024年
以上内容由遇见数据集搜集并总结生成


