Gibson Environment 感知数据集
收藏超神经2023-09-13 更新2024-05-15 收录
下载链接:
https://hyper.ai/cn/datasets/21627
下载链接
链接失效反馈官方服务:
资源简介:
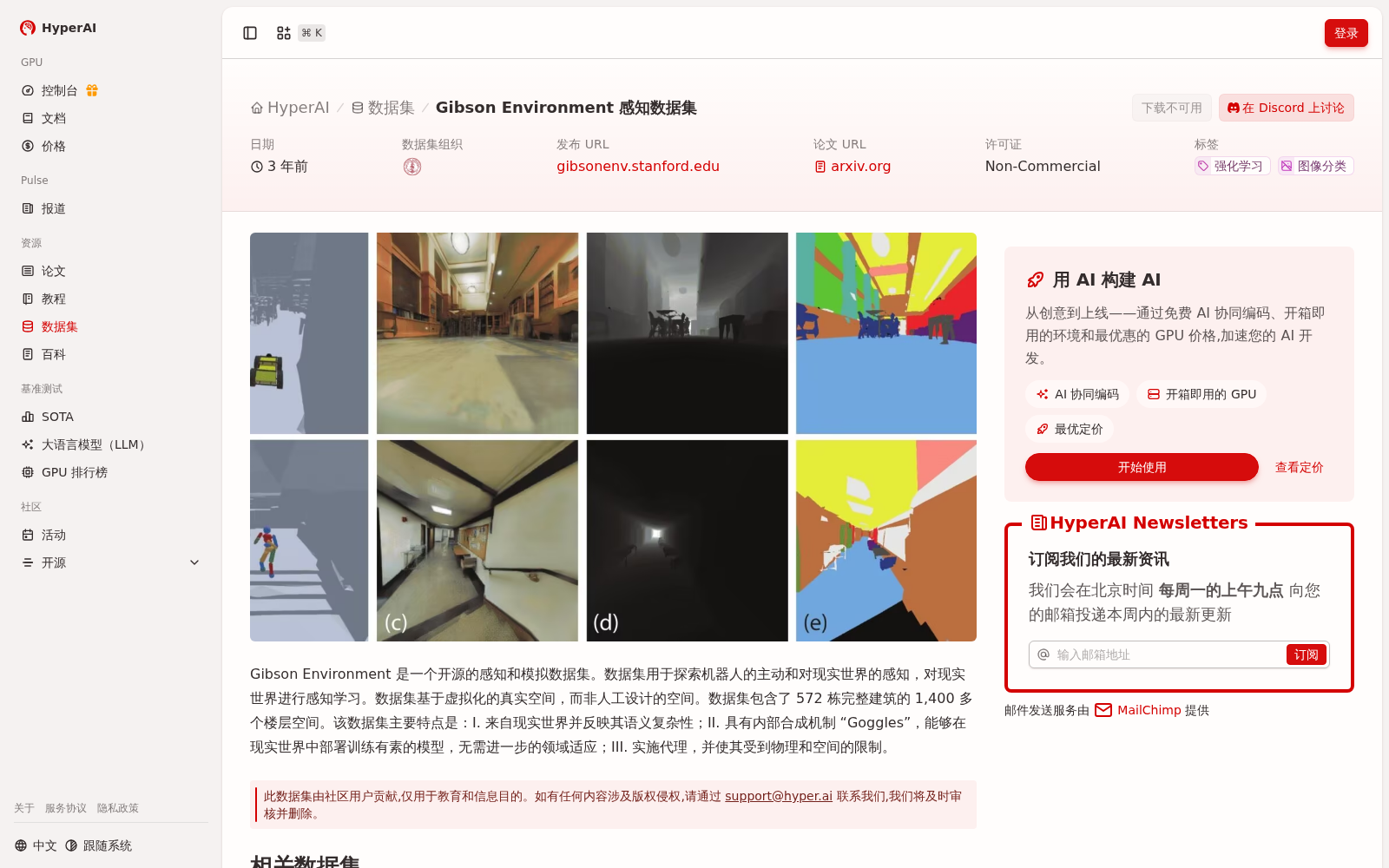
Gibson Environment 是一个开源的感知和模拟数据集。数据集用于探索机器人的主动和对现实世界的感知,对现实世界进行感知学习。数据集基于虚拟化的真实空间,而非人工设计的空间。数据集包含了 572 栋完整建筑的 1,400 多个楼层空间。该数据集主要特点是:I. 来自现实世界并反映其语义复杂性;II. 具有内部合成机制 “Goggles”,能够在现实世界中部署训练有素的模型,无需进一步的领域适应;III. 实施代理,并使其受到物理和空间的限制。
Gibson Environment is an open-source perception and simulation dataset. It is developed to explore robotic active perception, real-world perception, and perceptual learning of the physical world. The dataset is based on virtualized real-world spaces rather than artificially designed environments. It contains over 1,400 floor spaces across 572 complete buildings. The key characteristics of this dataset are as follows:
I. It is derived from real-world environments and reflects their semantic complexity;
II. It features an internal synthesis mechanism named "Goggles", which enables the deployment of trained models in real-world scenarios without further domain adaptation;
III. It implements agents constrained by physical and spatial rules.
创建时间:
2023-07-10
搜集汇总
数据集介绍
背景与挑战
背景概述
Gibson Environment感知数据集是一个开源的感知和模拟数据集,专注于机器人的主动感知和现实世界学习。它基于虚拟化的真实空间,包含572栋建筑的1,400多个楼层空间,具有现实世界语义复杂性、内部合成机制'Goggles',并支持物理和空间限制的代理实施。该数据集由社区贡献,用于非商业的教育和研究目的。
以上内容由遇见数据集搜集并总结生成


