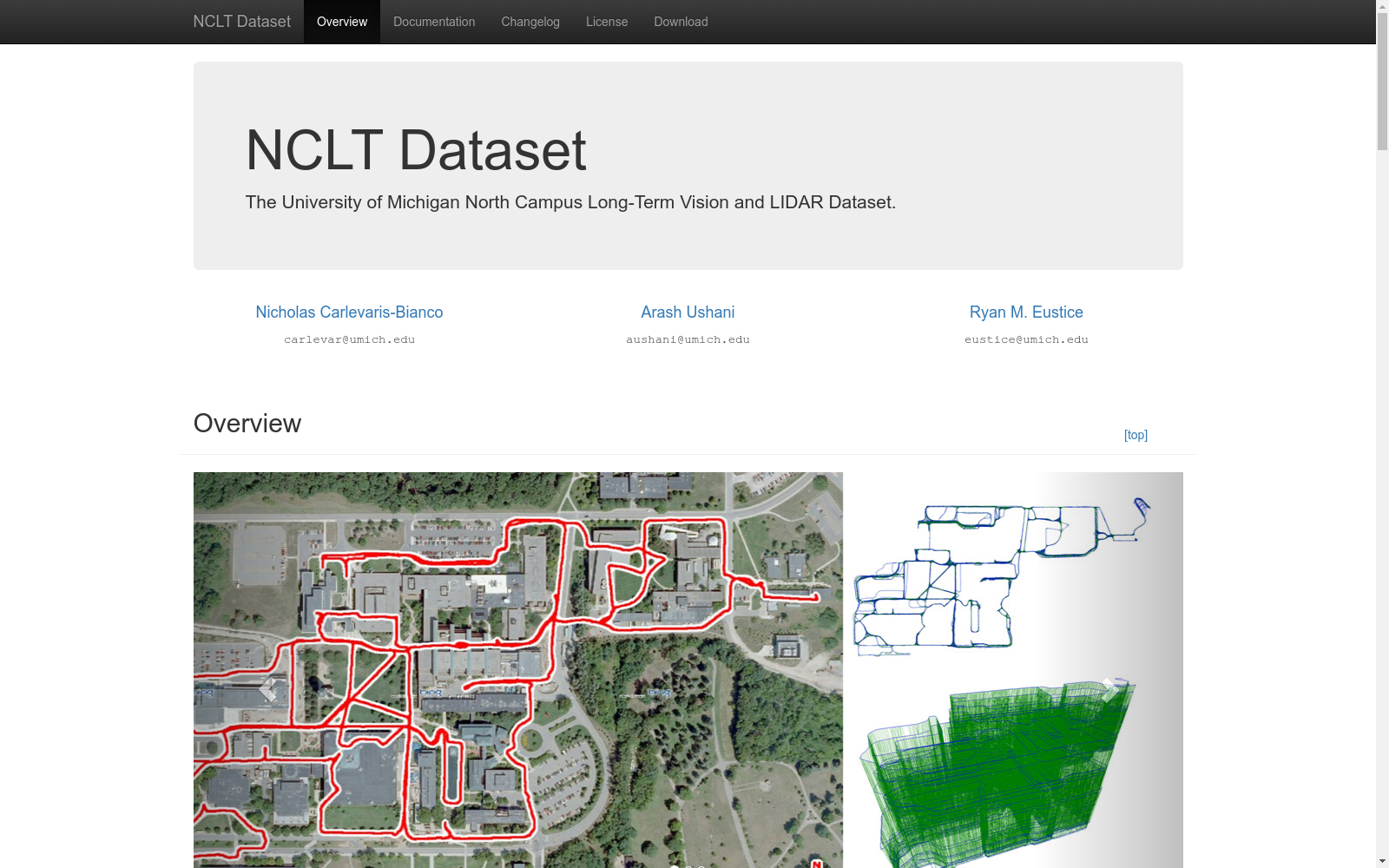
NCLT Dataset
收藏robots.engin.umich.edu2024-10-31 收录
下载链接:
http://robots.engin.umich.edu/nclt/
下载链接
链接失效反馈官方服务:
资源简介:
NCLT Dataset是一个用于长期定位和导航研究的数据集,包含了来自密歇根大学North Campus Long-Term Vision and LIDAR数据集的多种传感器数据,如IMU、GPS、激光雷达和视觉数据。该数据集主要用于研究机器人和自动驾驶车辆的长期定位和导航问题。
The NCLT Dataset is a dataset dedicated to research on long-term localization and navigation. It includes diverse sensor data sourced from the University of Michigan North Campus Long-Term Vision and LIDAR Dataset, such as IMU, GPS, LiDAR and visual data. This dataset is primarily utilized to investigate long-term localization and navigation problems for robots and autonomous vehicles.
提供机构:
robots.engin.umich.edu
搜集汇总
数据集介绍
构建方式
NCLT Dataset,即North Carolina Localization and Mapping Dataset,是由北卡罗来纳大学教堂山分校的机器人实验室构建的。该数据集旨在为机器人定位与地图构建研究提供一个全面且多样化的测试平台。数据集的构建过程包括在多个不同环境和天气条件下,使用多种传感器(如激光雷达、IMU、GPS等)进行数据采集。这些数据经过精确的时间同步和校准,确保了数据的高质量和一致性。此外,数据集还包含了详细的传感器校准参数和环境描述,以支持各种定位与地图构建算法的开发与评估。
特点
NCLT Dataset以其丰富的数据多样性和高质量的数据采集而著称。该数据集涵盖了多种环境,包括室内、室外、城市和乡村等,以及不同的天气条件,如晴天、雨天和雪天。这种多样性使得研究人员能够在各种实际应用场景中测试和验证其算法。此外,数据集中的传感器数据经过精确的时间同步和校准,确保了数据的一致性和可靠性。数据集还提供了详细的传感器校准参数和环境描述,为算法的开发和评估提供了有力的支持。
使用方法
NCLT Dataset主要用于机器人定位与地图构建领域的研究。研究人员可以使用该数据集来开发和测试各种定位与地图构建算法,如SLAM(Simultaneous Localization and Mapping)算法。数据集中的传感器数据和环境描述可以用于训练和验证机器学习模型,以提高算法的精度和鲁棒性。此外,数据集还支持多传感器融合技术的研究,通过结合不同传感器的数据,可以进一步提高定位与地图构建的准确性。研究人员可以通过访问数据集的官方网站下载数据,并根据提供的文档进行数据处理和算法开发。
背景与挑战
背景概述
NCLT数据集,全称为Northwestern University Campus Long-Term Vision and LIDAR Dataset,由西北大学于2012年发布。该数据集旨在为长期视觉和激光雷达(LIDAR)研究提供一个全面的基准。通过记录校园环境中的多传感器数据,NCLT数据集为研究人员提供了一个真实且多样化的场景,以测试和验证自动驾驶、机器人导航及环境感知算法。其发布标志着在复杂环境下的长期数据采集和分析方面迈出了重要一步,极大地推动了相关领域的研究进展。
当前挑战
NCLT数据集在构建过程中面临了多项挑战。首先,长期数据采集需要处理传感器漂移和数据一致性问题,确保在不同时间点采集的数据能够准确对齐。其次,校园环境的动态变化,如行人、车辆和天气条件的变化,增加了数据处理的复杂性。此外,多传感器数据的融合与同步也是一个关键难题,要求高精度的时钟同步和数据融合算法。这些挑战不仅考验了数据采集技术,也对后续的数据分析和算法开发提出了高要求。
发展历史
创建时间与更新
NCLT Dataset由密歇根大学于2013年创建,旨在为机器人和自动驾驶领域的研究提供高质量的定位和导航数据。该数据集自创建以来,经历了多次更新,最近一次更新是在2016年,以确保数据的时效性和准确性。
重要里程碑
NCLT Dataset的一个重要里程碑是其在2014年首次公开发布,迅速成为机器人和自动驾驶研究领域的重要资源。该数据集包含了来自多个传感器的数据,包括激光雷达、惯性测量单元和GPS,为研究人员提供了丰富的环境感知和定位信息。此外,NCLT Dataset还支持多种数据处理和分析工具,极大地促进了相关领域的算法开发和验证。
当前发展情况
当前,NCLT Dataset已成为机器人和自动驾驶领域不可或缺的基准数据集之一。其广泛应用于各种研究项目中,包括SLAM(同时定位与地图构建)、路径规划和环境感知等。NCLT Dataset的持续更新和扩展,确保了其在技术进步中的持续相关性,为新一代算法的开发和测试提供了坚实的基础。此外,该数据集的开放性和易用性,也促进了全球研究社区的合作与交流,推动了整个领域的快速发展。
发展历程
- NCLT Dataset首次发表,由美国国家标准与技术研究院(NIST)发布,旨在为自然语言处理领域的研究提供标准化的测试数据。
- NCLT Dataset首次应用于自然语言处理领域的研究,特别是在机器翻译和文本分类任务中,展示了其作为基准数据集的价值。
- NCLT Dataset被广泛应用于多个国际会议和竞赛中,如ACL和EMNLP,进一步提升了其在学术界的影响力。
- NCLT Dataset的扩展版本发布,增加了更多的语言对和数据量,以适应不断发展的自然语言处理技术需求。
- NCLT Dataset被用于训练大规模预训练语言模型,如BERT和GPT-3,展示了其在推动前沿技术发展中的重要作用。
常用场景
经典使用场景
在机器人导航与定位领域,NCLT Dataset 以其丰富的多传感器数据和长时间序列记录而著称。该数据集包含了激光雷达、惯性测量单元(IMU)、GPS等多种传感器的数据,为研究者提供了一个全面的环境感知平台。经典的使用场景包括基于SLAM(同步定位与地图构建)技术的室内外导航系统开发,以及多传感器融合算法的研究。通过这些数据,研究者能够验证和优化其算法在复杂环境中的表现。
实际应用
在实际应用中,NCLT Dataset 为自动驾驶、无人机导航以及工业机器人等领域提供了重要的数据支持。例如,自动驾驶车辆可以通过该数据集进行路径规划和障碍物检测算法的训练与测试,从而提高其在复杂城市环境中的导航能力。此外,工业机器人可以利用该数据集优化其在动态环境中的定位精度,提升生产效率和安全性。NCLT Dataset 的广泛应用展示了其在推动实际技术应用中的重要价值。
衍生相关工作
基于 NCLT Dataset,研究者们开展了一系列经典工作,推动了机器人导航与定位技术的发展。例如,有研究利用该数据集开发了高精度的多传感器融合算法,显著提升了机器人在复杂环境中的定位精度。此外,还有工作通过分析长时间序列数据,提出了新的SLAM优化方法,解决了长期定位漂移问题。这些衍生工作不仅丰富了机器人学的理论研究,也为实际应用提供了强有力的技术支持。
以上内容由遇见数据集搜集并总结生成


