DDAD 自监督单目图像深度估计数据集
收藏超神经2022-09-05 更新2024-05-15 收录
下载链接:
https://hyper.ai/cn/datasets/19015
下载链接
链接失效反馈官方服务:
资源简介:
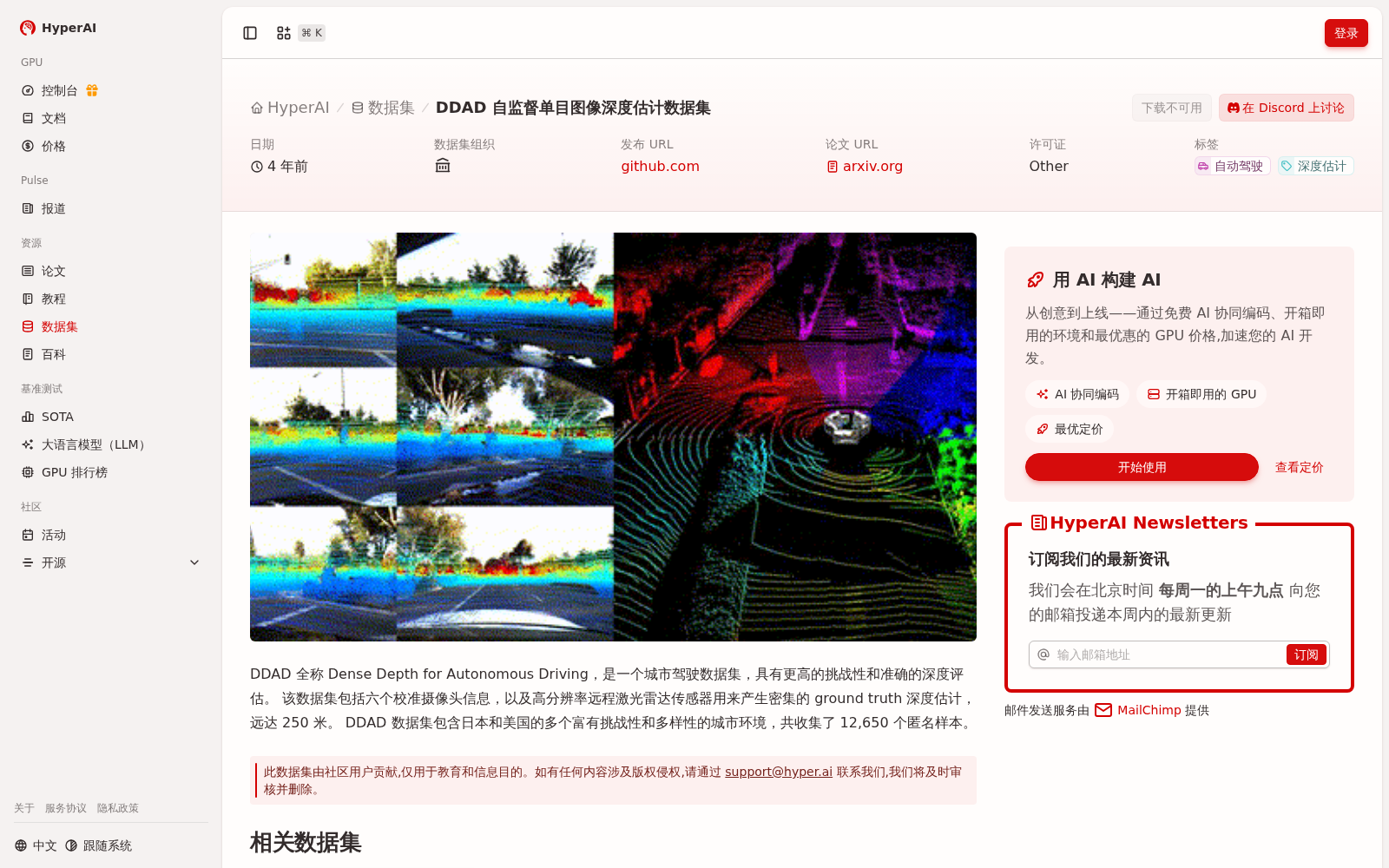
DDAD 全称 Dense Depth for Autonomous Driving,是一个城市驾驶数据集,具有更高的挑战性和准确的深度评估。
DDAD, short for Dense Depth for Autonomous Driving, is an urban driving dataset characterized by greater challenge and precise depth estimation.
创建时间:
2022-09-05
搜集汇总
数据集介绍
背景与挑战
背景概述
DDAD(Dense Depth for Autonomous Driving)是一个用于自动驾驶的自监督单目图像深度估计数据集,挑战性高且深度评估准确。它包含六个校准摄像头和高分辨率远程激光雷达传感器,可生成密集的真实深度估计,范围达250米,覆盖日本和美国多样化的城市环境,共12,650个匿名样本。
以上内容由遇见数据集搜集并总结生成


