VideoArtGS-20
收藏github2025-09-23 更新2025-09-25 收录
下载链接:
https://github.com/YuLiu-LY/VideoArtGS
下载链接
链接失效反馈官方服务:
资源简介:
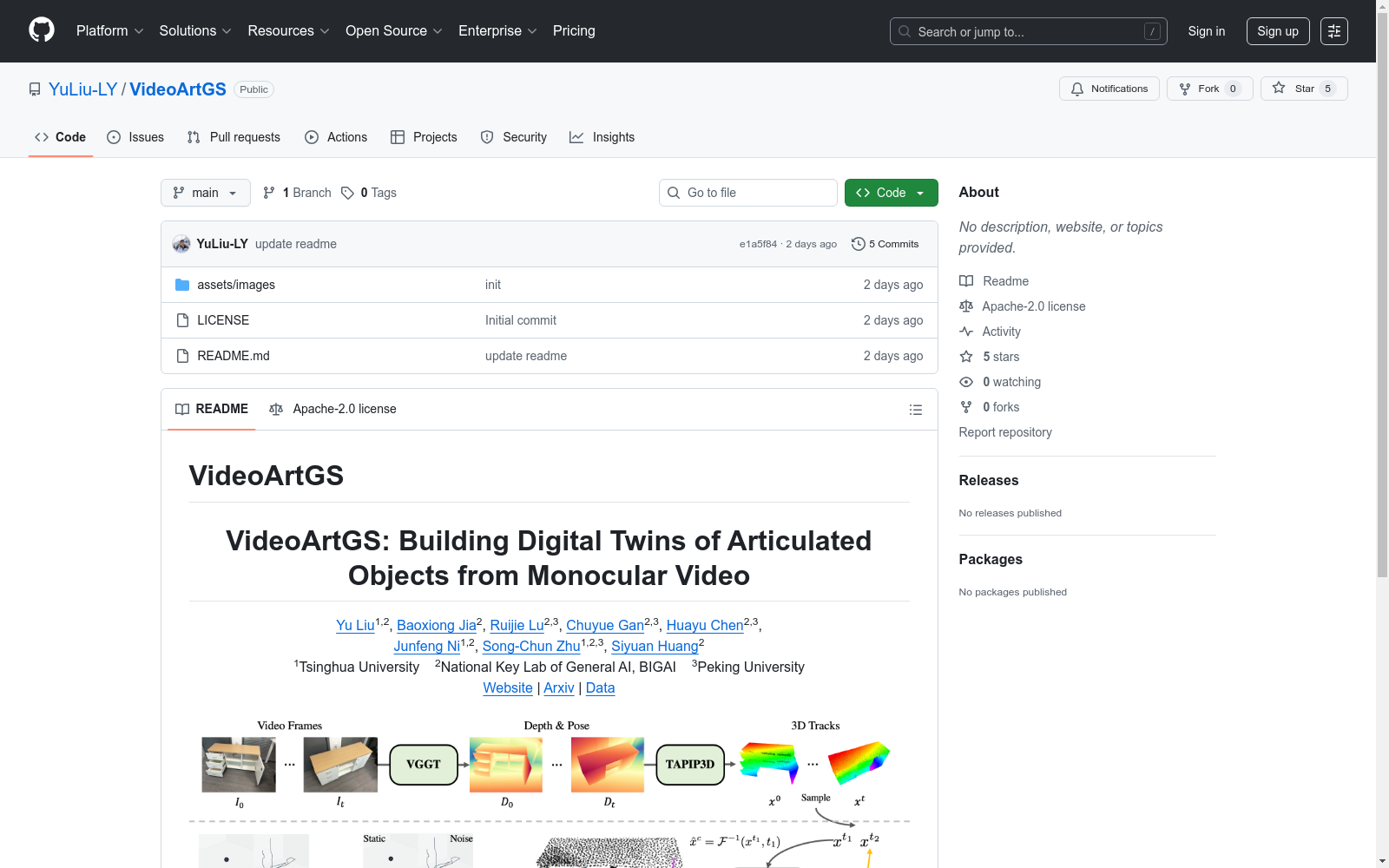
VideoArtGS-20数据集包含视频帧、深度和相机姿态。
The VideoArtGS-20 dataset comprises video frames, depth, and camera poses.
创建时间:
2025-09-22
原始信息汇总
VideoArtGS数据集概述
数据集名称
VideoArtGS-20
核心目标
从单目视频构建铰接物体的数字孪生
数据内容
- 视频帧
- 深度信息
- 相机位姿
数据获取
- 数据存储位置:https://huggingface.co/datasets/YuLiu/VideoArtGS-Data
- 完整代码和处理后的数据将在论文接受后发布
相关资源
- 项目网站:https://videoartgs.github.io/
- 论文链接:https://arxiv.org/abs/2509.17647
搜集汇总
数据集介绍
构建方式
在计算机视觉与机器人交互领域,VideoArtGS-20数据集的构建采用了从单目视频序列中提取多模态信息的技术路径。该过程基于动态场景的三维重建需求,通过采集包含关节物体运动的视频帧,并利用先进的深度估计算法与相机姿态估计技术,同步生成每一帧对应的深度信息与相机参数。这种构建方式有效避免了传统方法对多视角硬件的依赖,为关节物体的数字化建模提供了更为便捷的数据基础。
特点
VideoArtGS-20数据集的核心特点在于其专注于关节物体的动态建模,涵盖了视频帧、深度图与相机姿态三类关键数据。该数据集通过单目视频源实现了多模态数据的对齐,为研究关节物体的运动结构与三维属性提供了丰富的信息维度。其数据组织形式兼顾了机器感知与几何推理的需求,能够支持从二维视觉信号到三维数字孪生的跨模态学习任务,具有较强的实用性与扩展性。
使用方法
该数据集的使用需结合相应的三维重建或运动分析算法,用户可通过加载视频帧序列及其配套的深度与姿态数据,构建关节物体的动态模型。具体应用中,研究者可依据相机参数将二维观测映射至三维空间,进而实现物体运动轨迹的恢复或交互行为的仿真。数据集以标准化格式存储,便于直接嵌入主流深度学习框架,为数字孪生、机器人操作等场景提供数据支撑。
背景与挑战
背景概述
随着三维重建与数字孪生技术的快速发展,构建可动物体的高保真数字模型成为计算机视觉领域的重要研究方向。VideoArtGS-20数据集由清华大学、北京通用人工智能研究院及北京大学的研究团队于2024年联合创建,旨在通过单目视频序列实现关节化物体的三维重建与运动建模。该数据集聚焦于从动态视频中提取物体的几何结构、材质属性及运动轨迹,为机器人交互、虚拟现实等应用提供基础数据支持,推动了动态场景理解技术的边界拓展。
当前挑战
在关节化物体数字化建模领域,如何从单目视频中精确恢复物体的复杂运动链与局部形变是核心难题。VideoArtGS-20的构建需解决多帧间运动一致性、遮挡条件下的几何补全,以及弱纹理区域的深度估计等挑战。数据采集过程中,研究者需设计稳定的相机轨迹以覆盖物体全角度,并处理光照变化对材质反演的影响,同时确保运动序列的时序对齐与尺度统一。
常用场景
经典使用场景
在计算机视觉与机器人交互领域,VideoArtGS-20数据集为构建铰接式物体的数字孪生提供了关键支持。该数据集通过单目视频序列捕捉物体的动态结构变化,典型应用场景包括基于高斯溅射技术的三维重建与运动参数估计。研究者可利用视频帧、深度信息及相机位姿数据,实现对门、抽屉等常见铰接物体的几何与运动联合建模,为数字孪生生成提供标准化基准。
解决学术问题
该数据集致力于解决单目视频中铰接物体三维重建的学术挑战,尤其针对动态结构参数反演与运动轨迹解耦问题。通过提供多视角视频帧与精确的深度标注,它降低了复杂关节运动建模的难度,推动了非刚性物体表征学习的发展。其意义在于填补了单目视觉与数字孪生交叉领域的数据空白,为可交互场景理解提供了理论验证基础。
衍生相关工作
围绕该数据集衍生的经典工作主要集中在动态高斯溅射与神经渲染方向。相关研究通过融合时序信息与几何约束,发展了针对铰接物体的实时重建算法。部分工作进一步探索了运动传递与物理一致性建模,推动了数字孪生技术在仿真引擎中的集成,为后续的物体操控与场景生成研究奠定了方法论基础。
以上内容由遇见数据集搜集并总结生成


