SoftZoo
收藏arXiv2023-03-17 更新2024-06-21 收录
下载链接:
https://sites.google.com/view/softzoo-iclr-2023
下载链接
链接失效反馈官方服务:
资源简介:
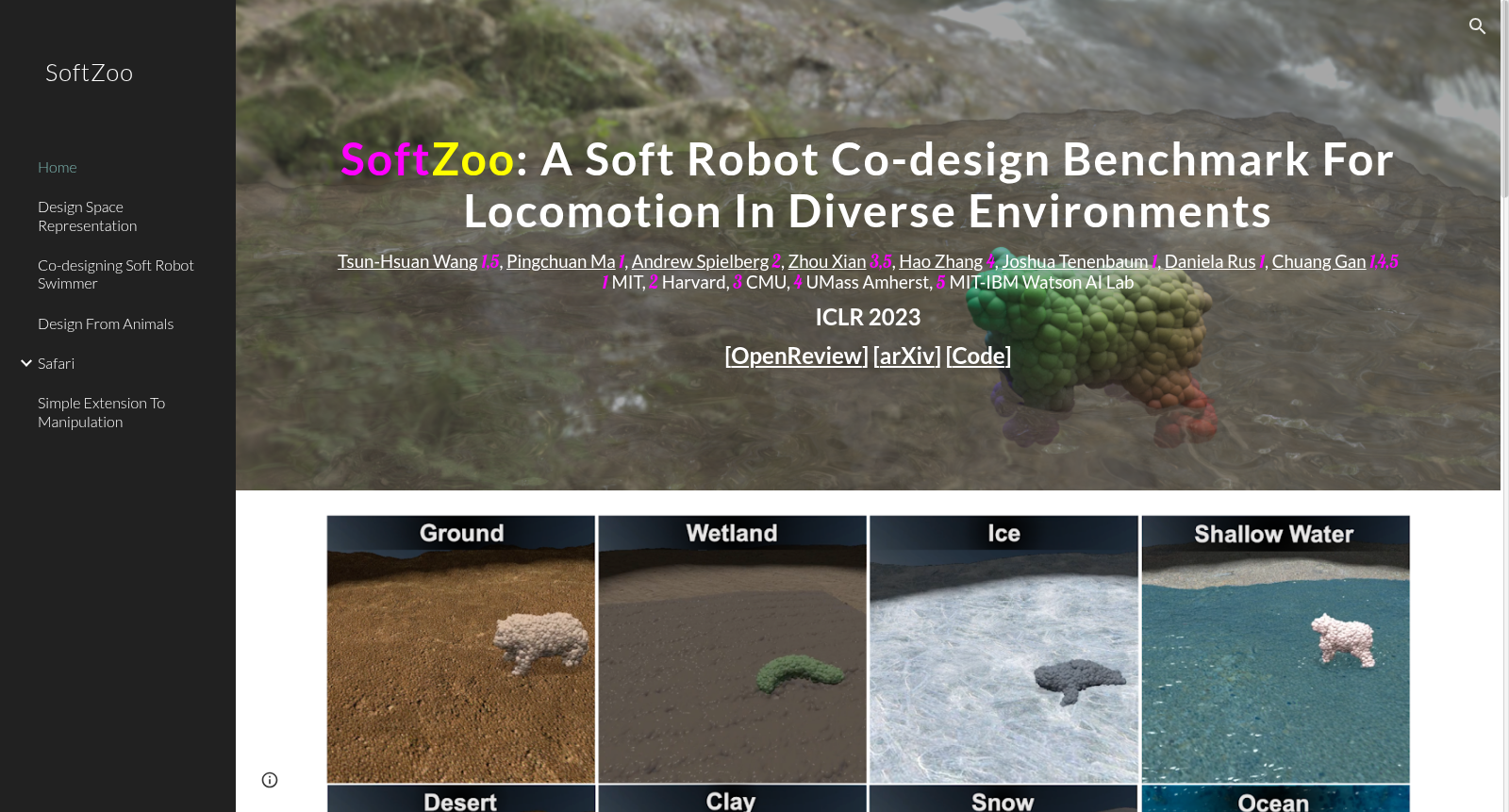
SoftZoo是由麻省理工学院计算机科学与人工智能实验室开发的一个软体机器人共设计平台,专注于多样化环境中的运动。该数据集支持广泛的仿生材料集,能够模拟包括平地、沙漠、湿地、粘土、冰、雪、浅水和海洋等多种环境。SoftZoo提供了一系列与软体机器人相关的任务,如快速运动、敏捷转弯和路径跟随,并提供了形态和控制的差异化设计表示。通过这些元素,SoftZoo形成了一个功能丰富的平台,用于分析和发展软体机器人共设计算法。该平台旨在解决软体机器人在复杂环境中的设计和控制问题,为新型表示和算法的开发提供标准平台和模板。
SoftZoo is a co-design platform for soft robots developed by the Computer Science and Artificial Intelligence Laboratory (CSAIL) at the Massachusetts Institute of Technology (MIT), focusing on locomotion across diverse environments. This dataset supports a broad collection of bionic materials and enables simulation of a wide array of environments including flat terrain, deserts, wetlands, clay, ice, snow, shallow water and oceans. SoftZoo offers a suite of tasks relevant to soft robotics, such as fast locomotion, agile turning and path following, alongside differentiated design representations for both morphology and control. By integrating these elements, SoftZoo constitutes a feature-rich platform for analyzing and advancing co-design algorithms for soft robots. This platform is designed to address design and control challenges for soft robots in complex environments, and serves as a standard platform and template for the development of novel representations and algorithms.
提供机构:
麻省理工学院计算机科学与人工智能实验室
创建时间:
2023-03-17
搜集汇总
数据集介绍
构建方式
在软体机器人协同设计领域,SoftZoo数据集的构建体现了对多物理环境模拟的高度重视。该平台基于移动最小二乘物质点法(MLS-MPM)构建了一个可微分的多物理仿真引擎,能够模拟包括地面、沙漠、湿地、黏土、冰、雪、浅水和海洋在内的多样化环境。数据集的构建过程涵盖了地形生成、机器人放置和材料覆盖三个关键步骤,其中地形通过Perlin噪声程序化生成高度图,并转换为网格表面。机器人设计则通过统一的接口指定几何形状、刚度和肌肉布局,支持点云、体素网格和网格等多种三维表示形式。这种构建方式不仅实现了对超弹性软体机器人的精确模拟,还通过可微分物理引擎为协同设计算法提供了基于模型的梯度信息,从而为形态与控制的联合优化奠定了坚实基础。
特点
SoftZoo数据集的核心特点在于其全面的环境覆盖与高度灵活的设计表示。该数据集集成了广泛受自然启发的材料集合,能够模拟多种物理现象,如弹性、塑性、流体性和粒子间摩擦,从而真实再现了沙、雪、橡胶、泥浆和水等常见材料的力学行为。在任务设计上,SoftZoo提供了快速运动、敏捷转向、速度跟踪和路径跟随等多种与软体机器人运动相关的任务,形成了丰富的评估基准。此外,数据集支持多样化的设计空间表示,包括粒子、体素、隐函数、可微分CPPN、SDF线性插值和Wasserstein重心等方法,这些表示形式为形态优化注入了不同程度的归纳偏置,显著提升了优化效果与算法开发的灵活性。
使用方法
SoftZoo数据集的使用方法围绕其作为软体机器人协同设计基准平台的定位展开。研究者可通过该平台系统评估不同表示形式与学习算法在多样化环境中的性能。具体而言,用户首先利用机器人设计接口定义几何、刚度和肌肉布局,随后在选定的环境中执行指定任务,如快速运动或路径跟随。平台提供的可微分物理引擎支持基于梯度的优化方法,同时也可与强化学习等无梯度算法结合使用,实现形态与控制的协同优化。通过观察接口、动作空间和奖励函数的设计,研究者能够深入分析环境、形态与行为之间的相互作用,从而推动新型表示形式与协同设计算法的开发,为软体机器人的形态智能与行为智能研究提供标准化实验框架。
背景与挑战
背景概述
软体机器人协同设计领域长期面临形态与行为协同优化的复杂挑战,传统方法常受限于特定环境或表征形式。为深入探索设计性能间的内在权衡并加速新型软体机器人的研发,麻省理工学院计算机科学与人工智能实验室等机构的研究团队于2023年推出了SoftZoo平台。该平台作为一个综合性虚拟基准,旨在通过模拟多样化环境(如沙漠、湿地、冰雪、海洋等)和提供多种运动任务,支持对软体机器人形态与控制的协同优化研究。其核心研究问题聚焦于如何在多变物理环境中实现形态与行为的高效协同设计,从而推动软体机器人领域向更高层次的形态智能与行为智能发展。
当前挑战
SoftZoo所解决的领域问题在于软体机器人在多样化环境中的运动协同设计,其挑战主要体现在形态与行为的复杂耦合优化上。具体而言,设计空间的高维性与非凸性导致优化过程易陷入局部最优,形态表征的灵活性不足可能限制机器人的环境适应性。在构建过程中,平台需集成可微分多物理场仿真引擎以支持梯度优化,但多材料交互、大变形及接触处理的精确模拟带来了计算复杂度与数值稳定性的双重挑战。此外,肌肉布局与控制器合成间的冗余性增加了协同设计问题的模糊性,而不同环境下的任务性能评估也要求平台具备高度可扩展性与基准一致性。
常用场景
经典使用场景
在软体机器人协同设计领域,SoftZoo数据集被广泛用于评估和比较不同形态与控制算法的性能。该平台通过模拟多样化环境,如沙漠、湿地、冰雪和水域,为研究者提供了一个标准化的测试基准。经典使用场景包括对生物启发形态(如海豹、毛毛虫、鱼类和熊猫)在不同地形中的运动能力进行系统性分析,从而揭示环境与形态之间的复杂交互关系。这种场景不仅验证了协同设计算法的有效性,还为理解自然界中形态与行为的适应性提供了计算视角。
解决学术问题
SoftZoo数据集解决了软体机器人协同设计中的多个核心学术问题。它通过可微分多物理仿真引擎,实现了对形态、刚度和肌肉布局的联合优化,从而克服了传统简化模型在复杂环境模拟中的局限性。该数据集显著推进了对设计空间表示、肌肉形成与控制器合成之间模糊性、以及梯度优化方法价值的研究。具体而言,它帮助学者深入探究环境驱动下的形态智能生成机制,并为基于梯度的协同设计算法提供了可靠的评估框架,填补了该领域在系统化基准测试方面的空白。
衍生相关工作
SoftZoo数据集衍生了一系列重要的相关研究工作。在算法层面,它推动了基于可微分物理的协同设计方法(如DiffAqua)与进化算法(如CPPN-NEAT)的融合比较研究。在表示学习方面,该数据集启发了对隐式函数、体素网格和SDF插值等多种形态表示方法的系统性评估。此外,SoftZoo为后续研究(如PlasticineLab、EvoGym等)提供了环境多样性和物理真实性的新标准,促进了软体机器人仿真平台向多物理、可微分方向的演进,并为跨领域的形态智能研究建立了可扩展的基准框架。
以上内容由遇见数据集搜集并总结生成


