Tactile Functasets
收藏arXiv2024-09-23 更新2024-09-26 收录
下载链接:
https://www.mmintlab.com/tactile-functasets
下载链接
链接失效反馈官方服务:
资源简介:
Tactile Functasets是由密歇根大学开发的一个用于触觉传感器数据的高效存储和处理的数据集。该数据集通过神经隐式函数来重建触觉传感器的高维数据,生成紧凑的表示形式,从而解决了传统触觉图像数据存储和处理的高成本问题。数据集的创建过程涉及训练神经网络以捕捉触觉数据的底层结构,并使用共享的基础网络和调制向量来表示多个触觉输入。该数据集主要应用于机器人操作中的物体姿态估计任务,旨在提高触觉传感在机器人领域的实时性能和传感器灵活性。
Tactile Functasets is a dataset developed by the University of Michigan for efficient storage and processing of tactile sensor data. This dataset reconstructs high-dimensional tactile sensor data via neural implicit functions to generate compact representations, thereby addressing the high-cost issues in storage and processing of traditional tactile image data. The creation of this dataset involves training neural networks to capture the underlying structure of tactile data, and using a shared base network and modulation vectors to represent multiple tactile inputs. This dataset is primarily applied to object pose estimation tasks in robotic manipulation, aiming to improve the real-time performance and sensor flexibility of tactile sensing in the robotics field.
提供机构:
密歇根大学
创建时间:
2024-09-23
搜集汇总
数据集介绍
构建方式
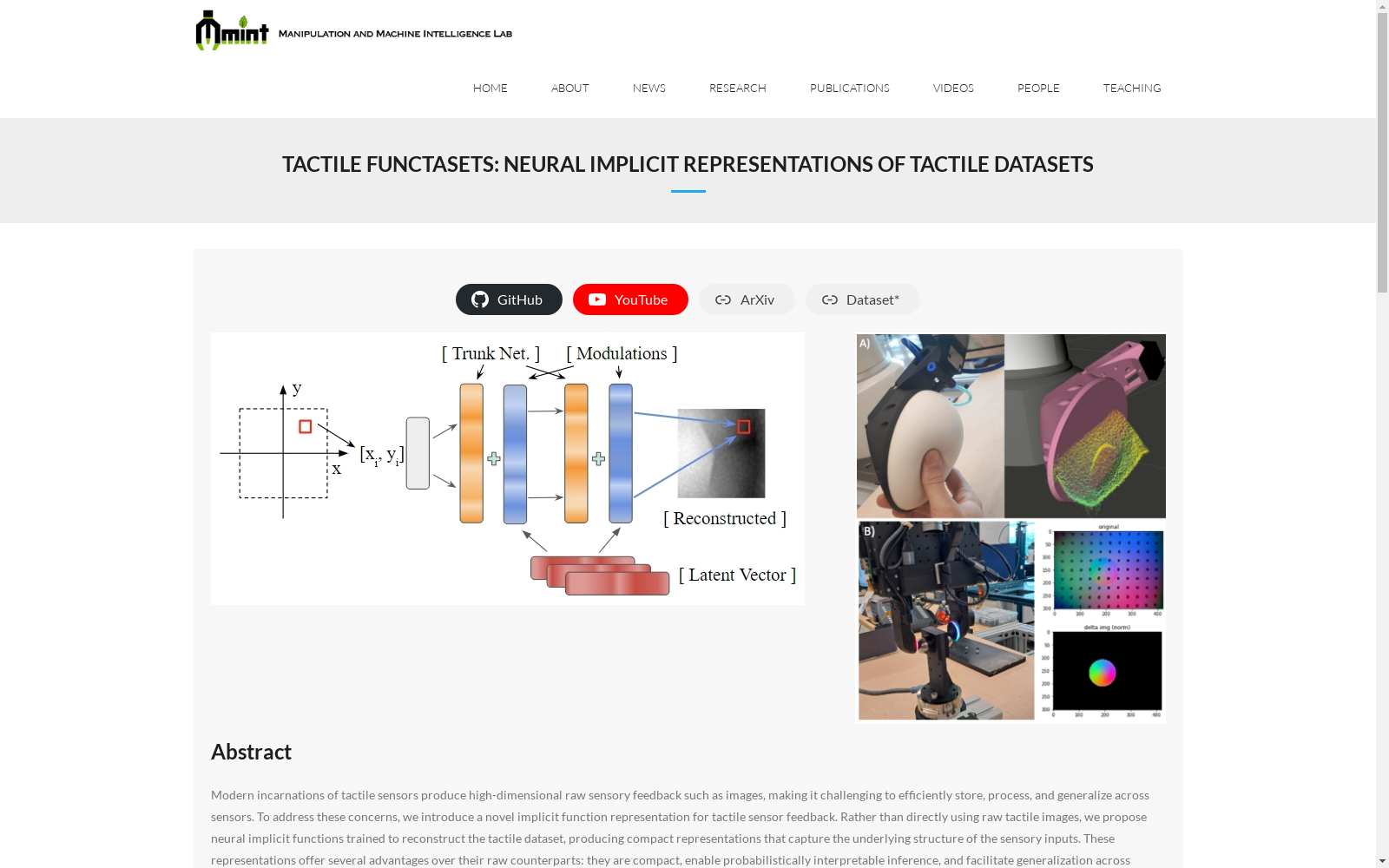
Tactile Functasets数据集的构建方式独特且创新,通过神经隐式函数(neural implicit functions)来表示触觉传感器反馈。不同于传统的直接使用原始触觉图像,研究团队训练神经网络以重建触觉数据集,生成紧凑且表达力强的表示。这些隐式函数捕捉触觉数据的底层结构,并通过共享主干网络(trunk network)和数据特定调制向量(modulation vectors)来实现。具体而言,主干网络学习触觉信号的共同结构,而调制向量则调整主干网络的输出以表示特定触觉图像,从而显著减少存储和计算成本。
特点
Tactile Functasets数据集的主要特点在于其紧凑性和高效性。通过神经隐式表示,数据集不仅大幅减少了存储需求,还提高了实时推理的效率。此外,这种表示方法支持概率可解释的推理策略,这对于需要不确定性处理的任务至关重要。最重要的是,该表示方法具有跨不同传感器类型的泛化能力,使得模型在不同传感器间无缝迁移成为可能,无需大量重新训练。
使用方法
使用Tactile Functasets数据集时,首先需要加载预训练的主干网络和调制向量。对于新的触觉输入,通过优化其调制向量,同时保持主干网络不变,来生成触觉图像的神经隐式表示。这一过程可以通过随机梯度朗之万动力学(Stochastic Gradient Langevin Dynamics, SGLD)或k近邻(k-Nearest Neighbors, k-NN)方法来加速。随后,这些表示可以输入到下游模型中,如用于手内物体姿态估计的模型,以实现高效且准确的推理。
背景与挑战
背景概述
Tactile Functasets数据集由Sikai Li、Samanta Rodriguez、Yiming Dou、Andrew Owens和Nima Fazeli等研究人员于2024年创建,旨在解决现代触觉传感器产生的高维原始感官反馈(如图像)在存储、处理和跨传感器泛化方面的挑战。该数据集的核心研究问题是如何通过神经隐式函数表示来高效地存储和处理触觉数据,从而生成紧凑的表示形式,捕捉感官输入的底层结构。这一研究对机器人领域具有重要意义,特别是在需要实时性能和传感器灵活性的场景中,推动了触觉感知和复杂环境中的触觉驱动操作的新可能性。
当前挑战
Tactile Functasets数据集面临的挑战主要包括两个方面。首先,触觉传感器输出的高维图像数据处理和存储成本高,且难以在不同传感器设计之间进行泛化。其次,现有的触觉数据使用方法,如直接使用原始数据或手工提取特征,存在计算资源消耗大、泛化能力差以及难以融入概率框架等问题。构建过程中,研究人员需克服高维数据压缩、神经隐式函数训练以及跨传感器泛化等技术难题,以实现高效、紧凑且具有泛化能力的触觉数据表示。
常用场景
经典使用场景
在机器人操作领域,Tactile Functasets数据集的经典使用场景主要集中在高效存储和处理高维触觉传感器反馈数据。通过神经隐式函数表示,该数据集能够将触觉图像转化为紧凑的表示形式,从而显著减少存储和计算负担。这种表示方法不仅适用于实时推理,还能在下游任务如物体姿态估计中实现性能提升,同时简化模型复杂度。
解决学术问题
Tactile Functasets数据集解决了触觉传感数据高维度和多样性带来的学术研究难题。传统方法依赖于直接使用原始触觉图像或手工提取特征,这些方法在处理高维数据时效率低下且难以泛化。该数据集通过神经隐式函数表示,提供了一种紧凑、可解释且泛化能力强的解决方案,推动了触觉感知在机器人领域的广泛应用。
衍生相关工作
Tactile Functasets数据集的提出激发了一系列相关研究工作。例如,基于该数据集的神经隐式表示方法被应用于触觉图像生成和物体分类任务,进一步验证了其泛化能力和高效性。此外,该数据集还促进了跨模态学习和多传感器融合的研究,为触觉感知技术在机器人和人工智能领域的深入应用提供了新的思路和方法。
以上内容由遇见数据集搜集并总结生成


