Eiffel Tower
收藏arXiv2023-05-09 更新2024-07-17 收录
下载链接:
https://www.seanoe.org/data/00810/92226/
下载链接
链接失效反馈官方服务:
资源简介:
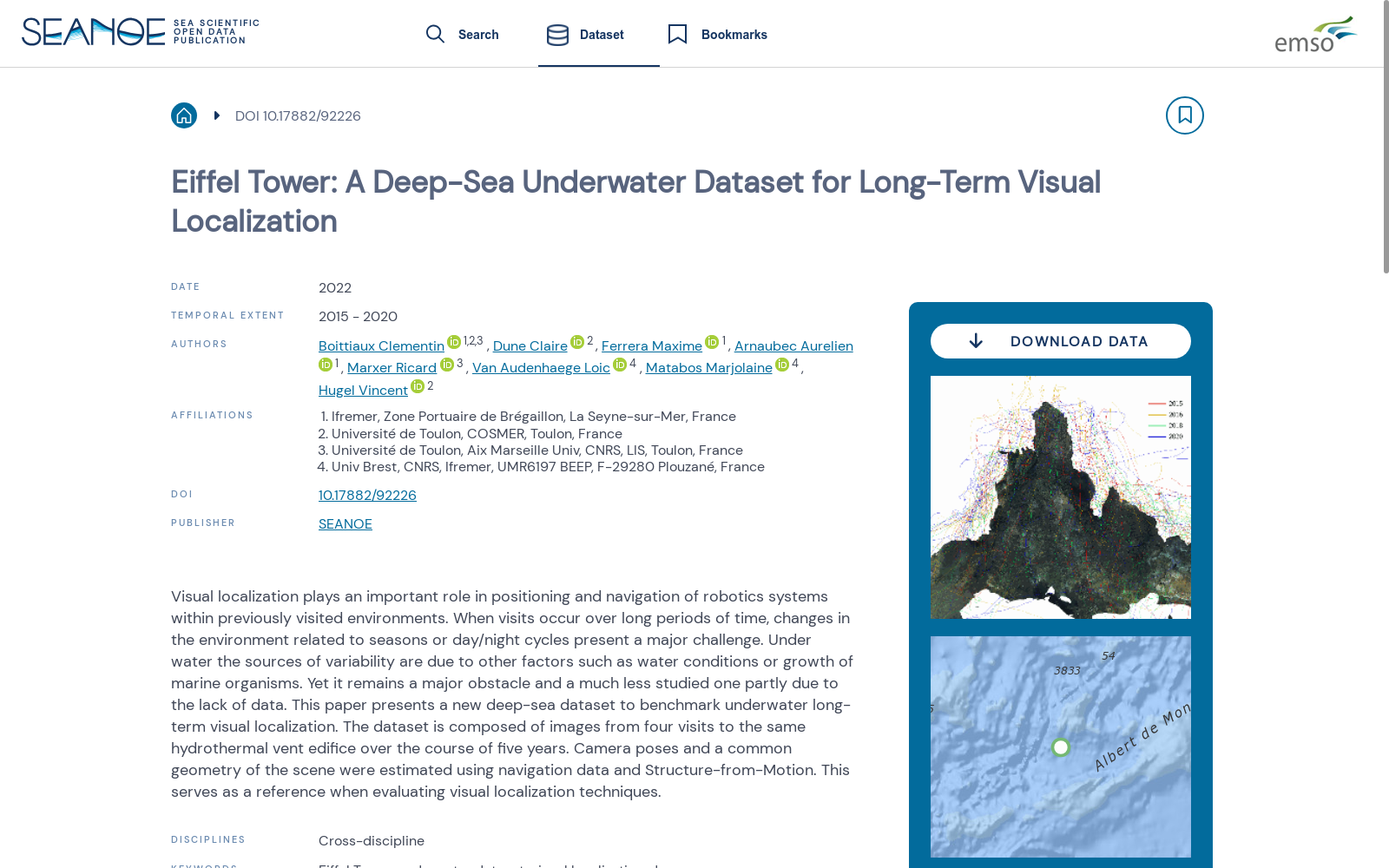
Eiffel Tower数据集是由法国国家海洋科学研究所等机构创建,用于深海长期视觉定位研究。该数据集包含四次不同年份对同一热液喷口的访问数据,总计五年的监测。数据内容包括图像、导航数据和场景的三维模型,这些数据展示了由于季节、日夜循环和海洋生物生长等因素引起的环境变化。数据集的创建过程涉及使用Structure-from-Motion技术估计相机姿态和场景几何。该数据集主要应用于评估和改进水下长期视觉定位技术,解决环境变化对定位精度的影响。
The Eiffel Tower Dataset was created by institutions including the French National Institute for Ocean Science and other relevant organizations, for long-term visual positioning research in deep-sea environments. This dataset contains data from four field visits to the same hydrothermal vent conducted in different years, encompassing a total of five years of monitoring. The collected data includes images, navigation data, and 3D models of the scene, which capture environmental variations induced by factors such as seasonal shifts, diurnal cycles, and the growth of marine organisms. The construction of this dataset utilized Structure-from-Motion (SfM) techniques to estimate camera poses and scene geometry. This dataset is primarily applied to evaluate and advance underwater long-term visual positioning technologies, aiming to mitigate the impact of environmental changes on positioning accuracy.
提供机构:
法国国家海洋科学研究所
创建时间:
2023-05-09
搜集汇总
数据集介绍
构建方式
Eiffel Tower数据集通过四次对同一深海热液喷口结构的访问,跨越五年的时间,构建了一个用于长期视觉定位的深海数据集。数据集的构建采用了Structure-from-Motion(SfM)技术,结合导航数据来估计相机姿态和场景几何结构。每个访问年份的图像和3D模型都被整合到一个共同的参考框架中,以提供一个全局3D模型,作为评估视觉定位技术的基准。
使用方法
Eiffel Tower数据集可用于评估和开发深海环境中的长期视觉定位技术。研究者可以使用数据集中的图像和3D模型来训练和测试视觉定位算法,特别是那些需要处理环境变化和长期时间跨度的算法。数据集的公开可用性为研究人员提供了一个标准化的基准,以比较不同算法在深海环境中的性能。此外,数据集还可用于研究深海环境中的地质和生态变化,为海洋科学研究提供支持。
背景与挑战
背景概述
随着自主水下航行器(AUVs)和遥控水下航行器(ROVs)的兴起,这些设备在水下环境中进行精确自身定位的需求日益增加。视觉定位技术在此背景下应运而生,其核心任务是通过图像和先前在该区域的观测数据来估计摄像机的六自由度(6DOF)姿态。Eiffel Tower数据集由Clémentin Boittiaux等人于2023年创建,主要研究人员来自Ifremer、Université de Toulon等机构。该数据集通过四次对同一深海热液喷口遗址的访问,跨越五年的时间,提供了丰富的图像和导航数据,旨在解决水下长期视觉定位的难题。这一数据集的发布填补了水下长期视觉定位数据集的空白,对水下机器人导航和环境监测具有重要意义。
当前挑战
Eiffel Tower数据集面临的挑战主要源于水下环境的复杂性和长期变化。首先,水下图像受到光线和颜色吸收、浑浊度和后向散射等多种视觉扰动的影响,这些因素在深海环境中尤为显著。其次,由于水下环境的长期变化,如微生物和动物群落的分布变化、地形变化等,传统的视觉定位方法难以适应。此外,现有的水下数据集大多覆盖时间较短,无法反映长期变化,导致现有方法在处理多年深海图像序列时存在局限。Eiffel Tower数据集通过提供多年跨度的图像和导航数据,为解决这些挑战提供了新的基准。
常用场景
经典使用场景
Eiffel Tower数据集的经典使用场景主要集中在深海环境中的长期视觉定位任务。该数据集通过提供同一热液喷口在五年内的四次访问图像,支持了机器人系统在复杂且动态变化的水下环境中的定位与导航研究。通过分析这些图像,研究人员可以评估和改进现有的视觉定位技术,特别是在处理由于水下条件变化(如水流、生物生长等)导致的视觉扰动方面。
解决学术问题
Eiffel Tower数据集解决了水下长期视觉定位中的一个关键学术问题,即如何在环境条件显著变化的情况下保持高精度的定位。传统的视觉定位方法在陆地上表现良好,但在水下环境中,由于光线吸收、浑浊度和生物生长等因素,定位精度大幅下降。该数据集通过提供长时间跨度的图像数据,帮助研究人员开发和验证能够适应这些变化的算法,从而推动水下机器人技术的发展。
实际应用
Eiffel Tower数据集的实际应用场景广泛,主要体现在深海探索和海洋科学研究中。例如,自主水下机器人(AUVs)和遥控水下机器人(ROVs)可以利用该数据集进行训练和测试,以提高其在复杂水下环境中的定位和导航能力。此外,该数据集还可用于监测深海热液喷口生态系统的变化,帮助科学家了解海洋生物多样性和生态系统的长期演变,从而为海洋保护和资源管理提供科学依据。
数据集最近研究
最新研究方向
在深海环境中,长期视觉定位(Long-Term Visual Localization)是一个具有挑战性的研究方向。Eiffel Tower数据集通过提供五年间对同一深海热液喷口遗址的四次访问图像,为这一领域的研究提供了宝贵的资源。该数据集不仅包含了图像数据,还包括了导航数据和通过运动结构(Structure-from-Motion, SfM)重建的3D模型,这些数据为评估视觉定位技术在深海环境中的长期性能提供了基准。前沿研究主要集中在如何利用深度学习技术,如SuperPoint和SuperGlue,来提高跨年度图像的特征匹配精度,以及如何通过结合多种传感器数据来增强定位的鲁棒性。此外,研究还关注于如何处理深海环境中特有的光照变化、水体浑浊度和生物群落变化等问题,以实现更精确的长期定位。
相关研究论文
- 1Eiffel Tower: A Deep-Sea Underwater Dataset for Long-Term Visual Localization法国国家海洋科学研究所 · 2023年
以上内容由遇见数据集搜集并总结生成


