ConPR
收藏ConPR: Ongoing Construction Site Dataset for Place Recognition
数据集
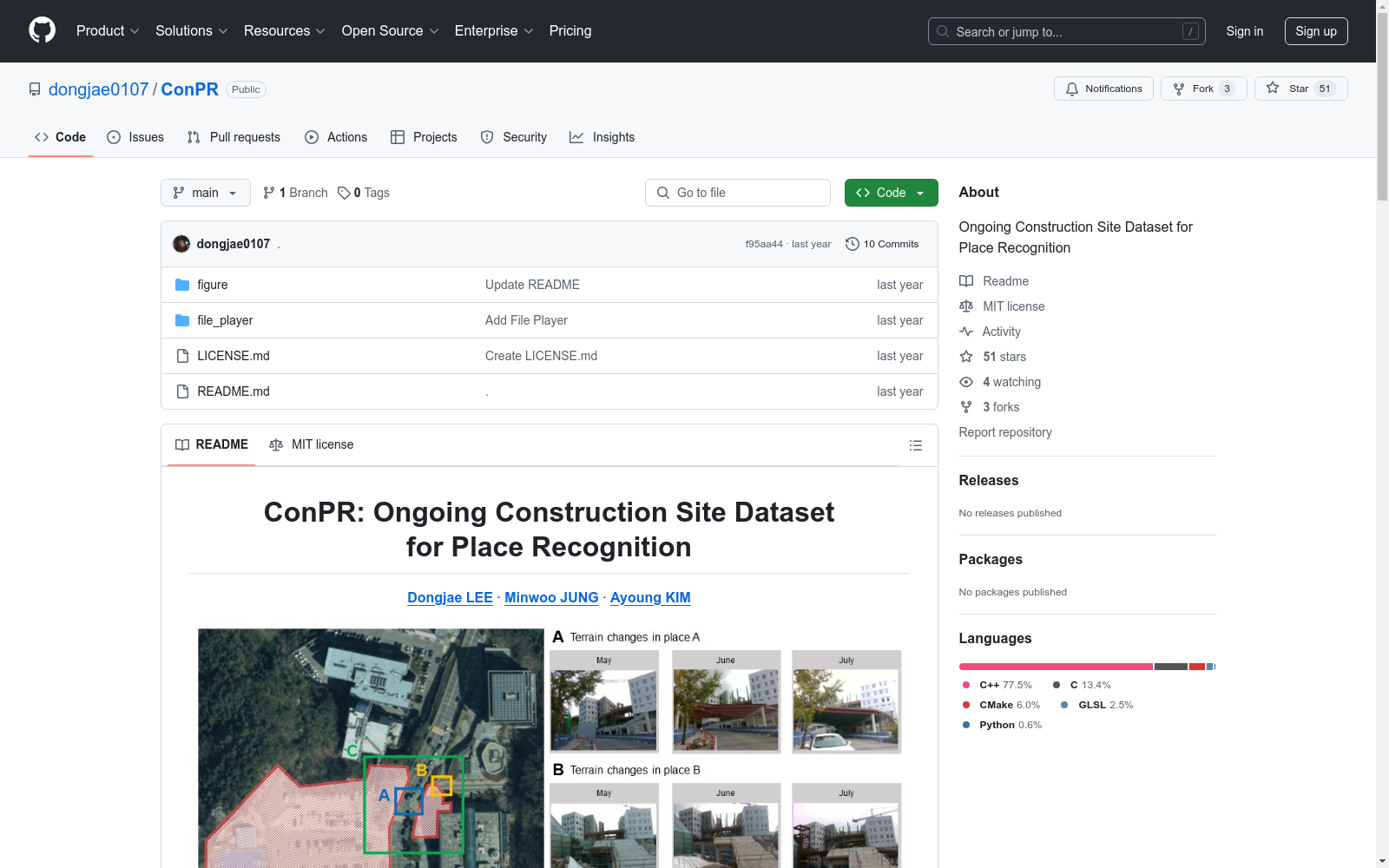
在建工地数据集
我们的数据集包括从建筑工地周围区域收集的各种数据,展示了正在进行的建筑过程。这使得研究人员能够在动态环境中评估地点识别算法,这些环境具有不断变化的条件下。
传感器配置
手持系统配备单目相机和3D固态激光雷达用于采集传感器数据。此外,我们还附加了IMU和GPS,以便用于其他目的(例如,视觉惯性里程计,激光雷达惯性里程计)。
| 传感器 | 制造商 | 型号 | 描述 | 频率 |
|---|---|---|---|---|
| RGB相机 | Intel | RealSense D435i | 全局快门RGB-D相机,分辨率(640,480) | 30Hz |
| 3D激光雷达 | Livox | Mid-70 | 扫描激光雷达,圆形视场70.4度 | 10Hz |
| IMU | MicroStrain | 3DM-GX5-AHRS | 高性能姿态和航向参考系统 | 250Hz |
| GPS | u-blox | ZED-F9P | 多频段GNSS接收器,提供厘米级精确姿态 | 10Hz |
数据格式
ConPR ├─Calibration │ calibration_cam.yaml │ calibration_gps.yaml │ calibration_imu.yaml │ calibration_lidar.yaml │ cameraParameter.txt │ report.pdf │ └─YYYYMMDD │ data_stamp.csv │ pose.csv │ imu.csv │ ├─Camera │ TIME_STAMP.png │ └─LiDAR TIME_STAMP.bin
- RGB相机
- 以30Hz采集的单目图像存储在Camera文件夹中。每个图像以其时间戳命名。
- 3D激光雷达
- 3D激光雷达数据以浮点二进制格式存储在LiDAR文件夹中。每个二进制文件以其时间戳命名。
- 数据格式遵循Livox自定义点云格式。更多详细信息,请参阅链接。
- IMU
- imu.csv存储由IMU传感器测量的方向、角速度和线性加速度数据。
- [时间戳, 四元数x, 四元数y, 四元数z, 四元数w, 角速度x, 角速度y, 角速度z, 线性加速度x, 线性加速度y, 线性加速度z]
- 姿态(SLAM + GPS)
- 由于存在众多高层建筑,RTK功能不正常,而原始GPS在通过桥梁下方时遇到困难。此外,户外环境阻止我们使用激光扫描仪生成地面真实数据。
- 因此,我们提供了代表手持系统路径的位置作为本地IMU坐标系中的地面真实信息,使用SLAM生成。
- 每个序列的位置使用FAST-LIO2生成,然后使用GPS测量和G-ICP转换为参考IMU框架,仅利用静态区域。
- 地面真实信息可以在pose.csv中找到。
- [时间戳, x, y, z]
- DataStamp
- data_stamp.csv提供所有传感器数据的时间戳和名称顺序。
- 文件播放器需要data_stamp.csv按顺序发布传感器数据。
- 校准数据
- 传感器之间的校准结果存储在Calibration文件夹中。
下载
引用
如果您使用我们的数据集进行项目,请引用我们的论文。
@inproceedings{ lee2023conpr, title={Con{PR}: Ongoing Construction Site Dataset for Place Recognition}, author={Dongjae LEE and Minwoo Jung and Ayoung Kim}, booktitle={IROS 2023 Workshop on Closing the Loop on Localization: What Are We Localizing For, and How Does That Shape Everything We Should Do?}, year={2023}, url={https://openreview.net/forum?id=I0gHRlQ5Xb} }
许可证
数据集
本页面上的所有数据集均由SNU RPM Labs版权所有,并根据<a href="https://creativecommons.org/licenses/by-nc-sa/4.0/">Creative Commons Attribution-NonCommercial-ShareAlike 4.0 License</a>发布。您必须以作者指定的方式归因作品。您不得将作品用于商业目的,并且如果您更改、转换或创作作品,则只能以相同的许可证分发结果作品。
代码
此代码根据MIT许可证的条款进行许可。有关许可证权利和限制,请参阅LICENSE文件。