Stanford Robocook
收藏github2025-03-21 收录
下载链接:
https://hshi74.github.io/robocook/
下载链接
链接失效反馈官方服务:
资源简介:
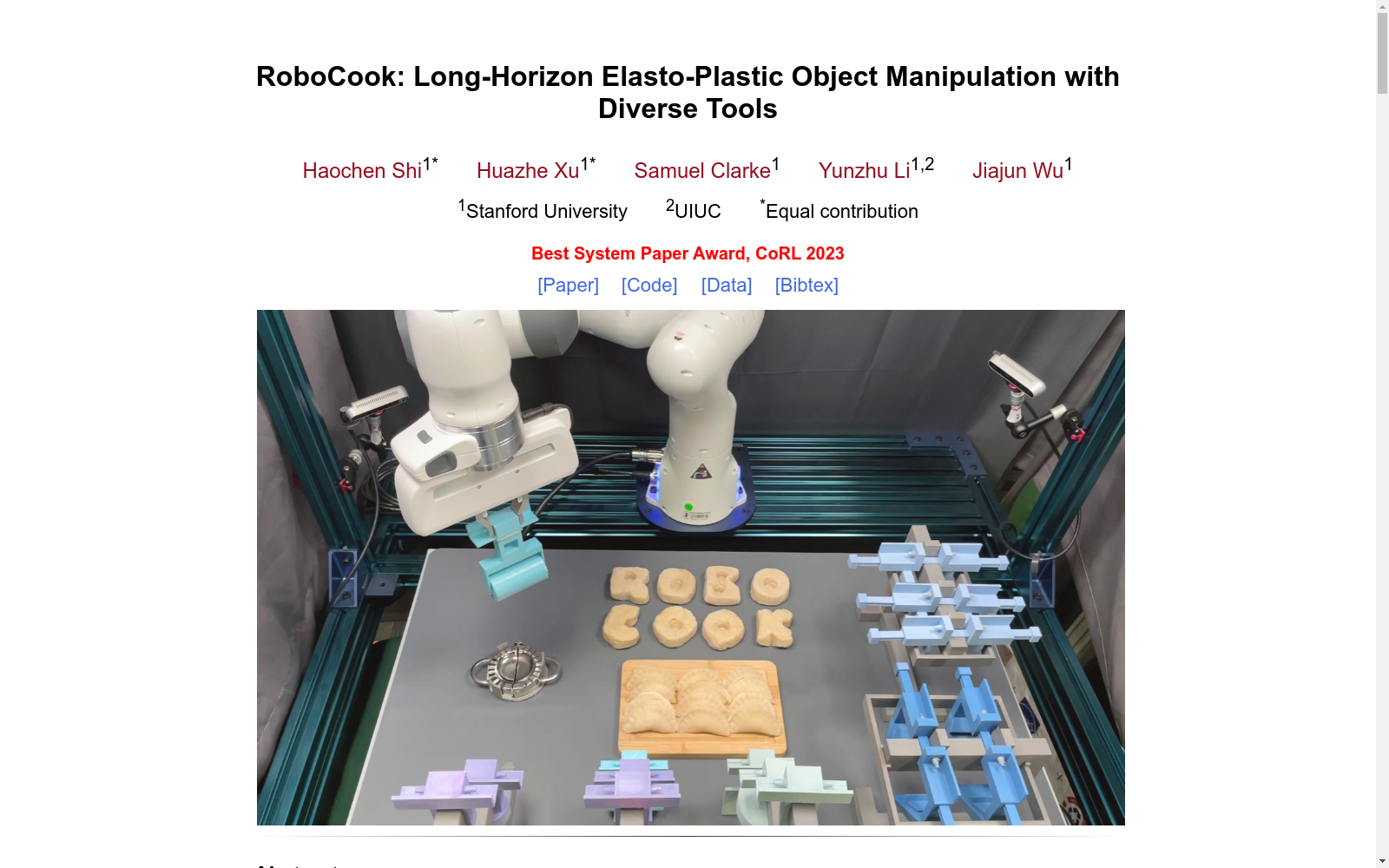
RoboCook 是由斯坦福大学和伊利诺伊大学厄巴纳-香槟分校的研究团队开发的智能机器人系统,旨在通过视觉感知、工具分类和自监督策略学习,实现对弹性塑性物体的复杂操作。该数据集包含用于训练和验证的点云数据、工具操作视频以及与各种工具交互的物理模型参数。数据集大小约为 20 分钟的真实世界交互数据,涵盖 15 种工具的操作,数据来源为实验室环境中的机器人操作实验。创建过程涉及使用多个 RGB-D 相机采集点云数据,并通过图神经网络(GNN)建模工具与物体之间的复杂交互。该数据集的应用领域是机器人操作技能学习,特别是针对需要多种工具和长时间规划的任务,如制作饺子和字母饼干。它旨在提高机器人在复杂环境中的适应性和鲁棒性。
RoboCook is an intelligent robotic system developed by research teams from Stanford University and the University of Illinois Urbana-Champaign, aiming to achieve complex manipulation of elasto-plastic objects via visual perception, tool classification, and self-supervised policy learning. This dataset contains point cloud data for training and validation, tool manipulation videos, and physical model parameters of interactions with various tools. The dataset spans approximately 20 minutes of real-world interaction data, covering operations with 15 types of tools, and is sourced from robotic manipulation experiments conducted in a laboratory setting. Its creation involved collecting point cloud data using multiple RGB-D cameras, and modeling the complex interactions between tools and objects via Graph Neural Networks (GNNs). The target application domain of this dataset is robotic manipulation skill learning, particularly for tasks that require multiple tools and long-term planning, such as making dumplings and letter-shaped cookies. It aims to enhance the adaptability and robustness of robots in complex environments.
提供机构:
斯坦福大学
搜集汇总
数据集介绍
构建方式
Stanford Robocook数据集的构建依托于先进的机器人操作实验平台,通过高精度传感器和自动化控制技术,采集了多种复杂操作任务中的机器人动作数据。数据采集过程中,研究人员设计了多样化的实验场景,涵盖了从简单抓取到复杂装配的多种任务类型。每个实验场景均经过严格的环境控制和数据校准,确保数据的准确性和一致性。数据集的构建还结合了多模态数据融合技术,包括视觉、触觉和力反馈等多维信息,为机器人操作研究提供了全面的数据支持。
特点
Stanford Robocook数据集以其多样性和高精度著称,涵盖了广泛的机器人操作任务,包括抓取、放置、装配等复杂动作。数据集不仅提供了丰富的多模态数据,还包含了详细的任务描述和环境参数,为研究者提供了全面的实验背景信息。此外,数据集的标注系统经过精心设计,能够支持多种机器学习算法的训练和验证。其高精度的传感器数据和多样化的任务场景,使其成为机器人操作领域的重要基准数据集。
使用方法
Stanford Robocook数据集的使用方法灵活多样,适用于机器人操作算法的开发与验证。研究者可以通过加载数据集中的多模态数据,结合任务描述和环境参数,进行算法训练和性能评估。数据集提供了标准化的数据接口和预处理工具,便于快速集成到现有的研究框架中。此外,数据集还支持多种机器学习任务,如动作预测、任务规划和控制策略优化等。通过利用数据集中的丰富信息,研究者可以深入探索机器人操作中的关键问题,并推动相关技术的发展。
背景与挑战
背景概述
Stanford Robocook数据集由斯坦福大学的研究团队于2022年创建,旨在推动机器人烹饪领域的研究与发展。该数据集的核心研究问题在于如何通过机器人技术实现复杂的烹饪任务,涵盖从食材处理到烹饪过程的自动化操作。研究人员通过多模态数据采集,包括视觉、触觉和运动控制数据,构建了一个全面的烹饪任务数据库。这一数据集不仅为机器人烹饪算法的开发提供了丰富的实验素材,也为相关领域的研究者提供了宝贵的参考资源,推动了智能厨房和家庭服务机器人的技术进步。
当前挑战
Stanford Robocook数据集在解决机器人烹饪领域的挑战中面临多重困难。首先,烹饪任务的多样性和复杂性要求机器人具备高度的灵活性和精确性,这对算法的鲁棒性和适应性提出了极高要求。其次,数据集的构建过程中,研究人员需要克服多模态数据同步采集的难题,尤其是在动态烹饪环境中,视觉与触觉数据的实时匹配尤为困难。此外,如何确保数据集的普适性和可扩展性,以支持不同烹饪场景和食材组合的研究,也是构建过程中的一大挑战。这些问题的解决将直接影响机器人烹饪技术的实际应用效果和推广范围。
常用场景
经典使用场景
Stanford Robocook数据集在机器人学习与自动化烹饪领域具有广泛的应用。该数据集通过记录多种烹饪任务中的机器人操作数据,为研究人员提供了一个丰富的实验平台。经典的使用场景包括机器人手臂的精确控制、多任务学习以及复杂环境下的决策制定。这些场景不仅展示了机器人在实际应用中的潜力,还为相关算法的优化提供了宝贵的数据支持。
实际应用
在实际应用中,Stanford Robocook数据集为自动化厨房和智能烹饪设备的开发提供了重要支持。通过分析数据集中的操作记录,研究人员能够设计出更加智能和高效的烹饪机器人,这些机器人能够在家庭、餐厅甚至工业厨房中执行复杂的烹饪任务。这不仅提高了烹饪效率,还减少了人为错误,为食品行业的自动化和智能化发展奠定了基础。
衍生相关工作
Stanford Robocook数据集衍生了许多经典的研究工作。例如,基于该数据集的研究成果被广泛应用于机器人控制算法的优化,特别是在多任务学习和复杂环境下的决策制定方面。此外,该数据集还激发了大量关于自动化烹饪和智能厨房的研究,推动了机器人技术在食品加工和服务领域的创新应用。这些衍生工作不仅丰富了机器人学习的研究内容,还为相关领域的实际应用提供了理论支持。
以上内容由遇见数据集搜集并总结生成


