OSMa-Bench
收藏arXiv2025-03-13 更新2025-03-15 收录
下载链接:
https://be2rlab.github.io/OSMa-Bench/
下载链接
链接失效反馈官方服务:
资源简介:
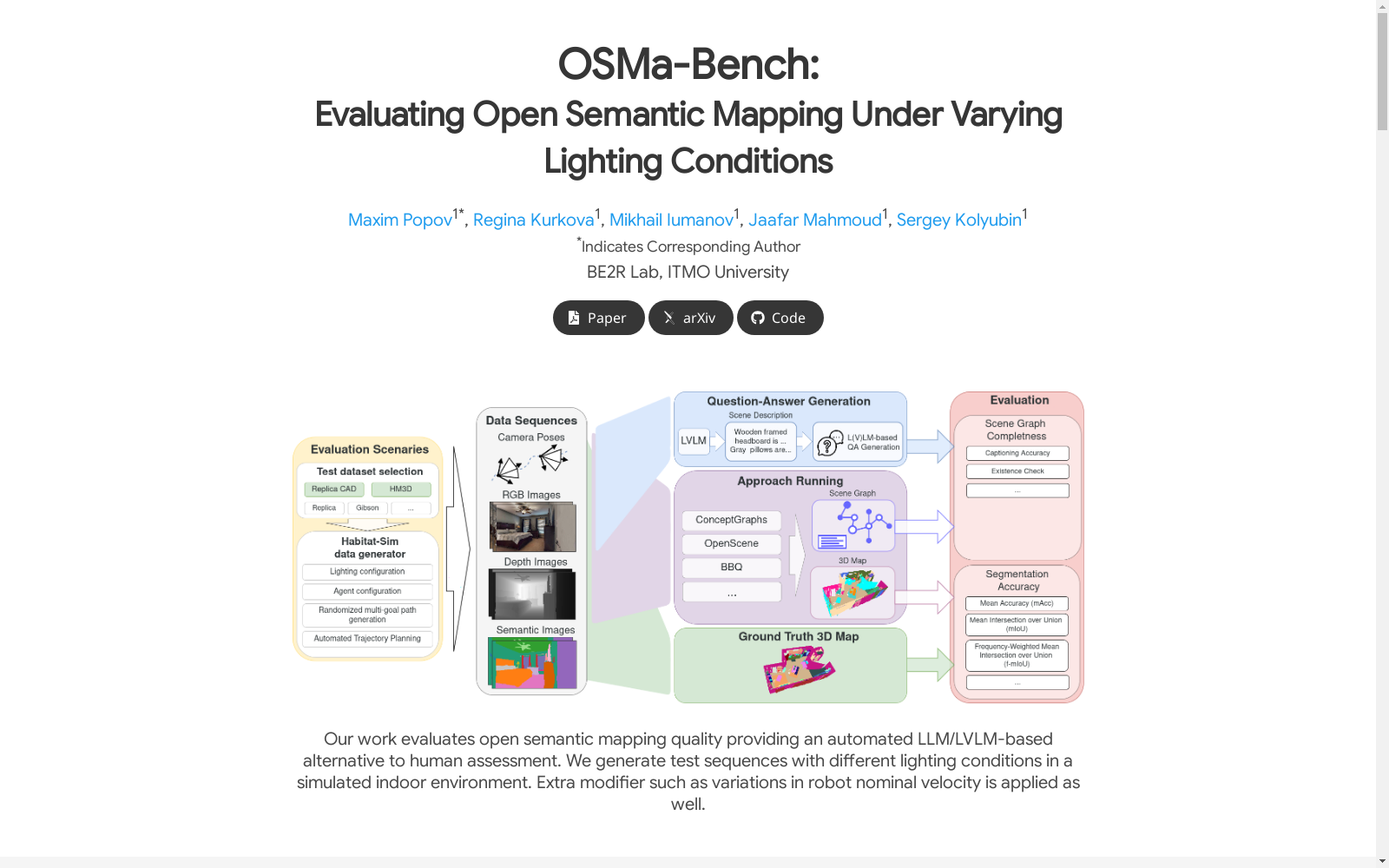
OSMa-Bench是一个新颖的评估框架,用于评估开放式语义映射在变化室内光照条件下的鲁棒性。该框架提供了两种数据集:ReplicaCAD和HM3D,这些数据集包含模拟的RGB-D序列和地面真实3D重建,用于在不同的光照条件下严格分析映射性能。ReplicaCAD数据集具有配置测试条件的灵活性,而HM3D数据集是高分辨率室内3D扫描的最大集合之一。这些数据集支持对机器人路径、光照条件等进行修改,以模拟真实环境中的多样动态条件。
OSMa-Bench is a novel evaluation framework for assessing the robustness of open-vocabulary semantic mapping under varying indoor lighting conditions. This framework provides two datasets, ReplicaCAD and HM3D, which contain simulated RGB-D sequences and ground-truth 3D reconstructions to rigorously analyze mapping performance across different lighting conditions. The ReplicaCAD dataset offers flexibility in configuring test conditions, while the HM3D dataset is one of the largest collections of high-resolution indoor 3D scans. Both datasets support modifications to robot paths, lighting conditions and other relevant parameters to simulate diverse dynamic conditions in real-world environments.
提供机构:
俄罗斯圣彼得堡国立信息技术、机械与光学大学(ITMO University)生物机械电子与高效机器人实验室(Biomechatronics and Energy-Efficient Robotics Lab)
创建时间:
2025-03-13
搜集汇总
数据集介绍
构建方式
OSMa-Bench 数据集通过模拟室内环境中的RGB-D序列和地面真实3D重建,提供了一个用于评估开放语义映射(OSM)解决方案的自动化流程。该流程利用了大型语言模型(LLM)和语言视觉模型(LVLM),并可以根据不同的室内光照条件进行动态配置。研究者通过在ReplicaCAD和HM3D数据集上添加控制扰动来生成测试序列,并使用Habitat Sim模拟环境来创建多样化的场景。同时,通过改变机器人代理的参考速度和路径,以及模拟不同的光照条件,来评估模型在不同情况下的性能。
特点
OSMa-Bench 数据集的特点在于其动态性和自动化。它能够模拟不同的室内光照条件,从而评估OSM算法在现实世界中的鲁棒性。此外,该数据集还包括了增强的地面真实数据,用于解决遮挡和歧义问题。同时,OSMa-Bench 使用LLM和LVLM来自动化生成和验证问题,从而评估知识图的准确性和一致性。最后,该数据集通过比较不同模型在语义分割和知识图质量方面的表现,提供了对当前SOTA方法的全面分析。
使用方法
使用OSMa-Bench 数据集的方法包括以下几个步骤:首先,在Habitat Sim中准备数据,包括加载3D场景模型、配置光照和代理路径及速度。其次,使用LLM和LVLM生成场景描述和问题,并进行验证以确保逻辑一致性。然后,根据不同的测试条件(如光照变化和速度变化)生成测试序列,并进行语义分割和知识图的评估。最后,通过比较不同模型在各个指标上的表现,来分析模型的鲁棒性和可靠性。OSMa-Bench 的自动化流程使得大范围的测试成为可能,并可以轻松地扩展测试条件以适应不同的环境和用例。
背景与挑战
背景概述
在机器人感知领域,开放词汇语义映射(Open Semantic Mapping, OSM)技术融合了语义分割和SLAM技术,使得机器人能够构建丰富、语义上有意义的场景表示,从而更有效地导航和交互。为了评估OSM解决方案的鲁棒性,特别是室内光照条件变化下的表现,Maxim Popov等人提出了一种名为OSMa-Bench的评估框架。该框架引入了一个模拟RGB-D序列和地面真实3D重建数据集,以帮助研究人员系统地分析不同光照条件下映射性能。该研究通过在ConceptGraphs、BBQ和OpenScene等领先模型上的实验,评估了物体识别和分割的语义保真度,并引入了一种场景图评估方法来分析模型对语义结构的解释能力。
当前挑战
OSMa-Bench数据集面临的挑战主要包括:1) 评估OSM解决方案在室内光照条件变化下的鲁棒性;2) 构建一个模拟不同光照条件的动态数据集,以测试模型在不同环境下的表现;3) 开发一个自动化的知识图谱评估流程,以评估模型对场景的理解能力。此外,还需要解决模型对光照变化的敏感性问题,以及如何提高模型在动态环境中的计算效率。
常用场景
经典使用场景
OSMa-Bench数据集主要用于评估开放语义映射算法在室内环境下的鲁棒性,特别是在不同光照条件下的表现。该数据集通过模拟RGB-D序列和地面真实3D重建,为研究人员提供了一个平台,以分析映射性能在不同光照条件下的变化。通过实验,研究人员可以评估最先进模型的语义保真度和分割质量,以及它们解释场景语义结构的能力。
实际应用
OSMa-Bench数据集的实际应用场景包括室内机器人导航、环境感知和交互。通过对不同光照条件下的语义映射算法进行评估,研究人员可以开发出更加鲁棒的机器人系统,使其能够在真实世界的动态环境中可靠地工作。此外,该数据集还可以用于开发新的语义映射算法,以适应各种室内环境,如家庭、办公室和工厂等。通过模拟不同的光照条件,研究人员可以测试算法在不同环境下的表现,从而确保算法的可靠性和有效性。
衍生相关工作
OSMa-Bench数据集的衍生工作包括对开放词汇语义映射算法的进一步研究和改进。通过该数据集的评估结果,研究人员可以识别出算法的弱点,并针对性地进行优化。此外,该数据集还可以用于开发新的评估方法,以更全面地评估语义映射算法的性能。例如,可以通过引入更多的评估指标,如时间消耗、内存使用等,来更全面地评估算法的效率和性能。
以上内容由遇见数据集搜集并总结生成


