Extrapolated Urban View Synthesis (EUVS) Benchmark
收藏arXiv2024-12-07 更新2024-12-10 收录
下载链接:
https://ai4ce.github.io/EUVS-Benchmark
下载链接
链接失效反馈官方服务:
资源简介:
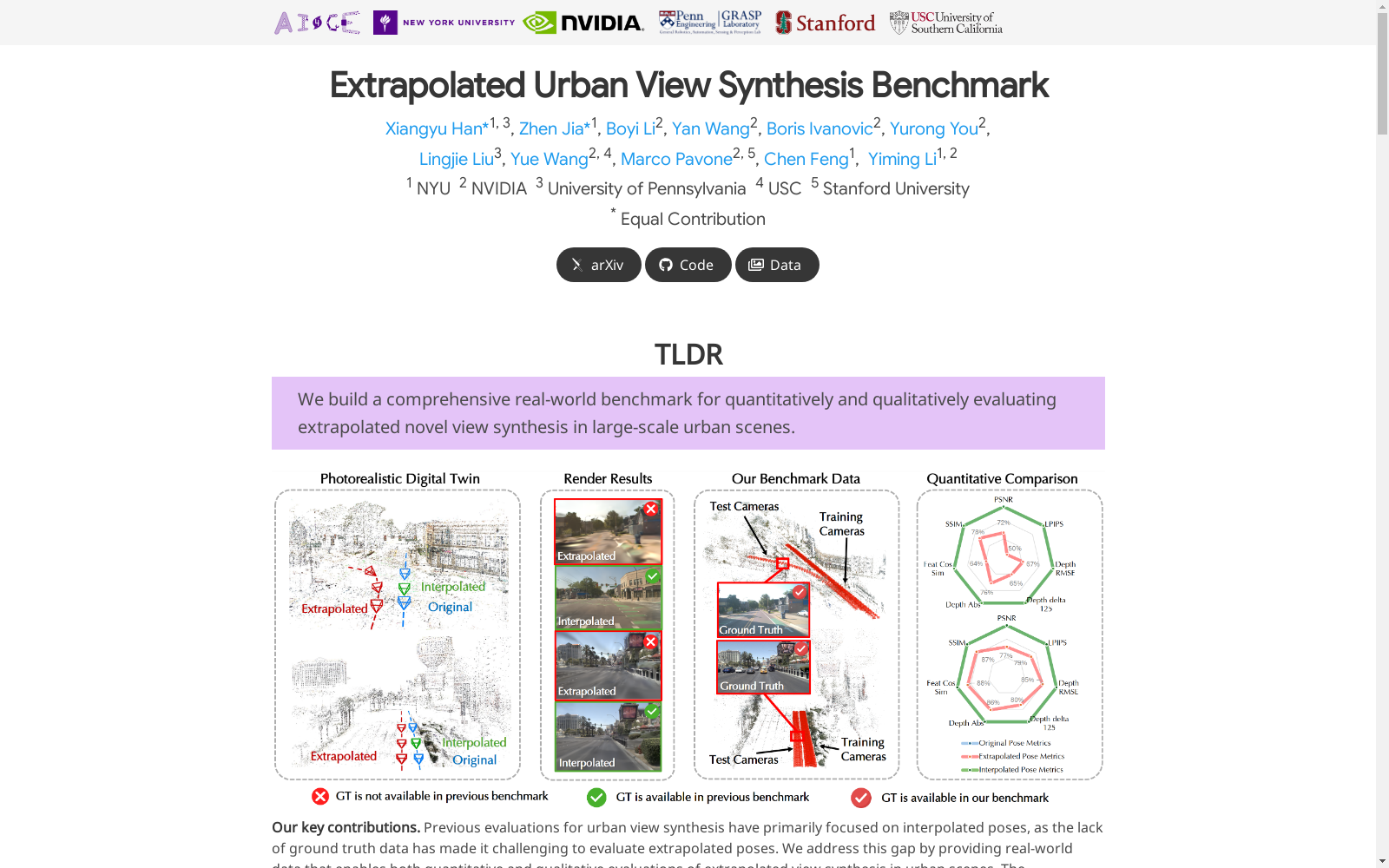
Extrapolated Urban View Synthesis (EUVS) Benchmark 是一个用于评估城市环境中外推视图合成的综合数据集。该数据集由纽约大学、NVIDIA等机构创建,包含90,810帧数据,涵盖345个视频,主要用于自动驾驶和城市机器人模拟技术。数据集整合了多遍历、多代理和多摄像头数据,旨在解决现有基准在评估外推视图合成时的不足。数据集的创建过程包括使用COLMAP进行姿态估计和稀疏重建,并分为三个难度级别进行评估。该数据集的应用领域主要是自动驾驶和城市机器人模拟,旨在提高视图合成技术在复杂城市环境中的鲁棒性。
The Extrapolated Urban View Synthesis (EUVS) Benchmark is a comprehensive dataset designed for evaluating view extrapolation in urban environments. Developed by institutions including New York University (NYU) and NVIDIA, among others, it contains 90,810 frames spanning 345 videos, and is primarily intended for autonomous driving and urban robotic simulation applications. The dataset integrates multi-traversal, multi-agent, and multi-camera data, aiming to address the limitations of existing benchmarks for view extrapolation evaluation. Its construction pipeline involves pose estimation and sparse reconstruction using COLMAP, and it supports evaluation across three predefined difficulty levels. The main application domains of this dataset are autonomous driving and urban robotic simulation, with the core objective of improving the robustness of view synthesis technologies in complex urban environments.
提供机构:
纽约大学、NVIDIA、宾夕法尼亚大学、南加州大学、斯坦福大学
创建时间:
2024-12-07
搜集汇总
数据集介绍
构建方式
Extrapolated Urban View Synthesis (EUVS) Benchmark 数据集通过整合公开的自动驾驶数据集,包括 NuPlan、Argoverse 2 和 MARS,构建而成。这些数据集提供了多遍历、多车辆和多摄像头的记录,涵盖了城市驾驶场景中的多样化视角和复杂性。数据集的构建过程中,定义了三种难度级别:仅平移、仅旋转以及平移加旋转,以模拟自动驾驶中常见的视角变化。通过使用 COLMAP 进行姿态估计和稀疏重建,初始化 3D 高斯点云,从而为高斯点云方法提供初始化。
使用方法
EUVS Benchmark 数据集适用于评估和改进城市环境中视图合成技术,特别是针对自动驾驶场景。研究者可以使用该数据集来训练和测试基于 3D 高斯点云的方法,通过对比不同难度级别下的性能指标,如 PSNR、SSIM 和 LPIPS,来评估模型的泛化能力和鲁棒性。此外,数据集还支持定性和定量分析,帮助研究者理解模型在处理复杂视角变化时的表现,并为开发更强大的视图合成方法提供参考。
背景与挑战
背景概述
Extrapolated Urban View Synthesis (EUVS) Benchmark 数据集由 NYU、NVIDIA、University of Pennsylvania 等机构的研究人员于2024年创建,旨在解决城市环境中自动驾驶车辆视角合成的问题。该数据集利用公开的自动驾驶数据集,如NuPlan、Argoverse 2和MARS,整合了多遍历、多车辆和多摄像头的记录,提供了丰富的城市驾驶场景数据。EUVS Benchmark 的核心研究问题是评估和提升在训练视角之外的新视角合成能力,这对于自动驾驶车辆的视觉模拟至关重要。该数据集的发布填补了现有基准测试中缺乏真实世界数据和量化评估的空白,推动了自动驾驶和城市机器人模拟技术的发展。
当前挑战
EUVS Benchmark 数据集面临的挑战主要集中在两个方面。首先,在领域问题解决方面,数据集旨在解决自动驾驶车辆在复杂城市环境中遇到的大视角变化问题,这要求模型能够从有限的训练视角中推断出新的、未见过的视角。其次,在数据集构建过程中,研究人员面临了如何有效整合和处理来自多个数据源的多遍历、多车辆和多摄像头数据,以确保数据的一致性和高质量。此外,如何设计有效的评估框架,以量化和质化地评估模型在新视角合成中的表现,也是一个重要的挑战。这些挑战共同构成了EUVS Benchmark 数据集在推动自动驾驶技术进步中的关键障碍。
常用场景
经典使用场景
Extrapolated Urban View Synthesis (EUVS) Benchmark 数据集的经典使用场景主要集中在城市环境中的新颖视角合成。该数据集通过提供多遍历、多车辆和多摄像头的真实世界数据,支持对城市场景中的外推视角合成进行定量和定性评估。具体应用包括自动驾驶车辆的视觉模拟,通过生成多样化的未见视角来适应自动驾驶车辆广泛的姿态分布。此外,该数据集还用于评估和改进基于3D高斯喷射(3D Gaussian Splatting)的方法,特别是在处理外推视角时的性能。
解决学术问题
EUVS Benchmark 数据集解决了在城市环境中进行外推视角合成时缺乏真实数据和标准化评估基准的学术问题。传统的评估方法主要集中在内插视角上,而外推视角的评估由于缺乏地面真实数据而变得困难。该数据集通过提供真实世界的数据,使得研究人员能够系统地评估和比较不同方法在外推视角合成中的表现,从而推动了通用模拟技术的发展。此外,该数据集还揭示了现有方法在处理大视角变化时的局限性,强调了开发更鲁棒方法的必要性。
实际应用
在实际应用中,EUVS Benchmark 数据集主要用于自动驾驶和城市机器人技术的模拟。通过提供高质量的视觉数据,该数据集支持开发和测试自动驾驶车辆的视觉感知和决策算法。具体应用包括训练和评估视觉中心自动驾驶车辆的模拟器,这些模拟器需要生成逼真的未见视角图像来模拟真实驾驶环境。此外,该数据集还可用于城市机器人技术的开发,如无人机和配送机器人的路径规划和环境感知。
数据集最近研究
最新研究方向
在自动驾驶和城市机器人领域,Extrapolated Urban View Synthesis (EUVS) Benchmark 数据集的最新研究方向主要集中在提升新视角合成的鲁棒性和真实感。随着3D高斯喷射(3D Gaussian Splatting)等技术的进步,研究者们致力于解决在训练视角与测试视角显著不同的情况下,如何生成高质量的合成视图。当前的研究热点包括利用扩散先验(diffusion priors)和改进几何表示来增强新视角合成的效果,特别是在处理复杂的都市场景时。此外,多遍历数据(multi-traversal data)的整合和多代理(multi-agent)数据的利用也成为提升模型泛化能力的关键。这些研究不仅推动了自动驾驶模拟技术的发展,也为城市机器人领域的视图合成提供了新的基准和方法。
相关研究论文
- 1Extrapolated Urban View Synthesis Benchmark纽约大学、NVIDIA、宾夕法尼亚大学、南加州大学、斯坦福大学 · 2024年
以上内容由遇见数据集搜集并总结生成


