DroneSplat Dataset
收藏arXiv2025-03-21 更新2025-03-25 收录
下载链接:
https://bityia.github.io/DroneSplat/
下载链接
链接失效反馈官方服务:
资源简介:
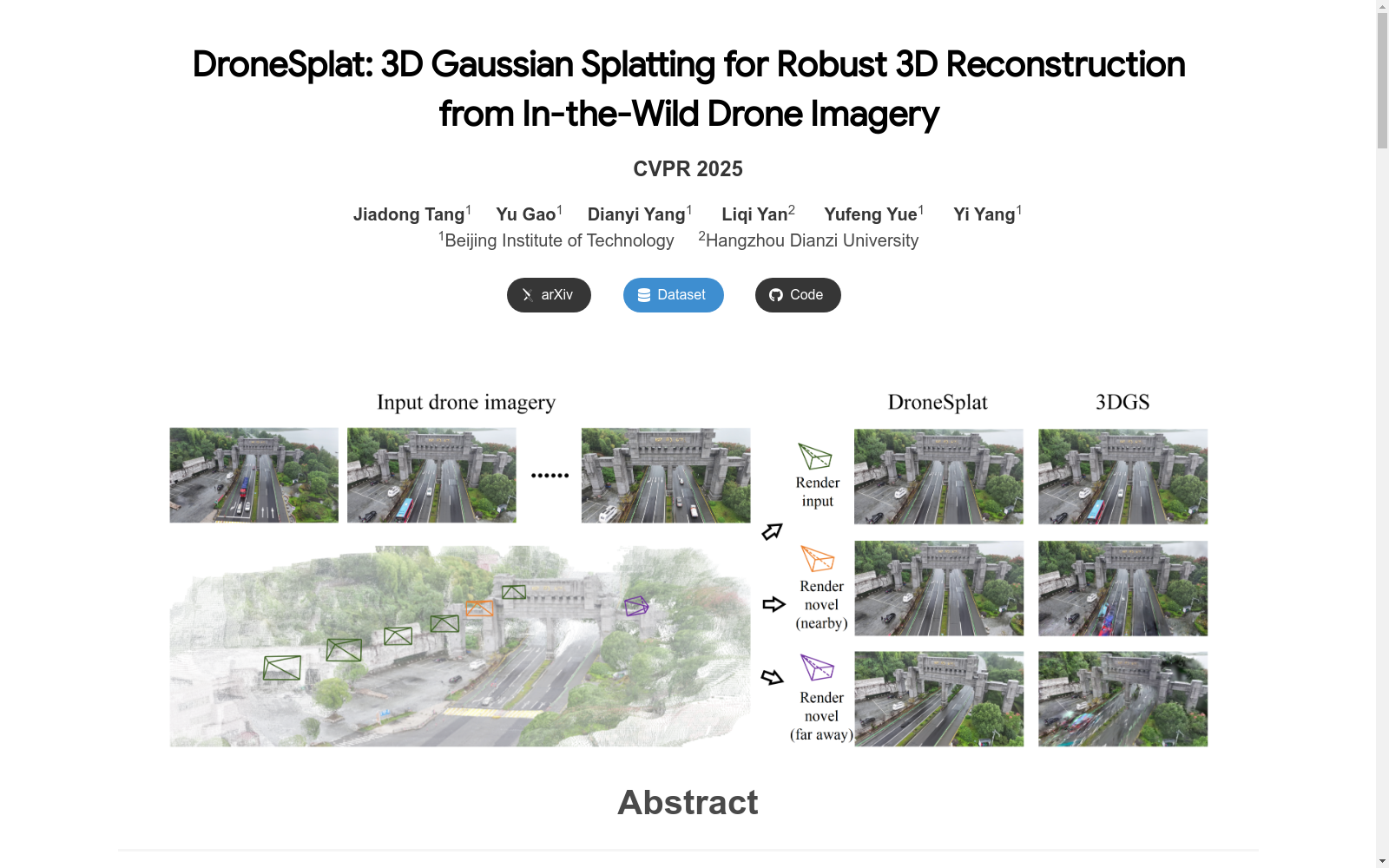
DroneSplat数据集是由北京理工大学和杭州电子科技大学提供的,包含24个由无人机捕获的序列,涵盖动态和静态场景。该数据集用于评估 DroneSplat 方法在野外的三维重建性能,包含多种动态干扰物,旨在解决无人机图像中动态干扰物对静态场景重建的影响问题。
The DroneSplat dataset, provided by Beijing Institute of Technology and Hangzhou Dianzi University, contains 24 sequences captured by drones, covering both dynamic and static scenes. This dataset is used to evaluate the 3D reconstruction performance of the DroneSplat method in real-world outdoor environments, and includes various dynamic distractors. Its purpose is to address the issue where dynamic distractors in drone images negatively impact the reconstruction of static scenes.
提供机构:
北京理工大学, 杭州电子科技大学
创建时间:
2025-03-21
搜集汇总
数据集介绍
构建方式
DroneSplat数据集通过无人机在野外环境中采集图像构建而成,涵盖动态与静态场景。数据采集采用DJI Mavic Pro 3无人机,图像分辨率包括1920×1080和3840×2160两种规格。动态场景根据动态干扰物的数量分为低动态、中动态和高动态三个等级,确保数据集的多样性和挑战性。此外,测试图像仅包含静态元素,以消除评估过程中的歧义。
特点
DroneSplat数据集以其丰富的场景多样性和高质量的图像采集著称。动态场景中包含多种移动物体,如车辆、行人等,且根据动态干扰物的数量分为不同等级,为算法鲁棒性评估提供了全面基准。静态场景则专注于几何结构的精确重建,尤其在视角受限的条件下。数据集的设计充分考虑了实际应用中的挑战,如动态干扰物的消除和稀疏视角下的几何重建。
使用方法
DroneSplat数据集适用于3D重建算法的训练与评估,尤其在动态场景处理和稀疏视角重建方面表现突出。用户可通过加载数据集中的图像序列,结合提供的相机参数,进行3D高斯泼溅(3D Gaussian Splatting)或其他辐射场方法的训练。数据集的动态场景测试集可用于验证算法在消除动态干扰物方面的性能,而静态场景测试集则适用于评估算法在视角受限条件下的几何重建能力。
背景与挑战
背景概述
DroneSplat数据集由北京理工大学和杭州电子科技大学的研究团队于2025年提出,旨在解决无人机在复杂野外环境中进行三维重建时面临的核心挑战。随着无人机在文化遗产保护、地质调查和城市测绘等领域的广泛应用,如何从动态干扰物众多的野外场景中实现鲁棒的三维重建成为关键科学问题。该数据集基于3D高斯泼溅技术(3D Gaussian Splatting),通过融合局部-全局分割启发式方法与统计策略,显著提升了动态干扰物的识别与消除能力,同时采用体素引导优化策略有效解决了视角稀疏条件下的几何重建难题。
当前挑战
该数据集主要应对两大挑战:在领域问题层面,传统辐射场方法基于静态场景假设,难以处理无人机影像中普遍存在的动态干扰物(如行驶车辆、行人等),且有限视角导致场景几何重建不准确;在构建过程层面,数据集采集面临动态干扰物像素级标注困难、多视角影像对齐精度不足等技术难题。具体表现为:动态物体与静态物体的语义混淆问题、小尺寸动态目标的漏检问题、以及稀疏视角下三维几何信息的欠拟合问题。这些挑战使得现有方法在真实野外场景中的重建质量显著下降。
常用场景
经典使用场景
在无人机航拍图像的三维重建领域,DroneSplat数据集通过其独特的3D高斯泼溅技术,为复杂动态场景下的静态重建提供了高效解决方案。该数据集特别适用于处理包含移动车辆、行人等动态干扰物的城市场景,能够精准分离动态元素并重建静态背景的三维几何结构。其多视角立体预测与体素引导优化策略,使得在有限视角约束下仍能保持重建精度,为文化遗产数字化、地质勘探等需要高保真三维模型的领域提供了可靠数据支持。
解决学术问题
该数据集有效解决了动态场景三维重建中的关键学术难题:通过自适应局部-全局掩码技术,突破了传统方法对预定义动态类别的依赖,实现了对任意动态干扰物的精准识别;针对无人机影像视角稀疏的特性,创新性地融合多视角立体几何先验与高斯泼溅优化,解决了有限视角下重建几何失真的问题。这些突破使得在非受控野外环境中获得高质量静态场景重建成为可能,推动了计算机视觉领域对动态干扰鲁棒性研究的深度发展。
衍生相关工作
该数据集催生了多个创新性研究方向:NeRF-HuGS通过启发式分割改进动态物体处理,WildGaussians探索了野外环境下的高斯泼溅优化,InstantSplat则开创了基于多视角立体的快速初始化范式。相关衍生工作集中在三个维度:动态干扰物的语义无关识别、稀疏视角下的几何先验融合,以及基于体素约束的优化策略,这些研究共同推动了无人机三维重建技术向更高效、更鲁棒的方向发展。
以上内容由遇见数据集搜集并总结生成


