omlab/Cross_RRSIS-D
收藏Hugging Face2025-10-02 更新2025-10-18 收录
下载链接:
https://hf-mirror.com/datasets/omlab/Cross_RRSIS-D
下载链接
链接失效反馈官方服务:
资源简介:
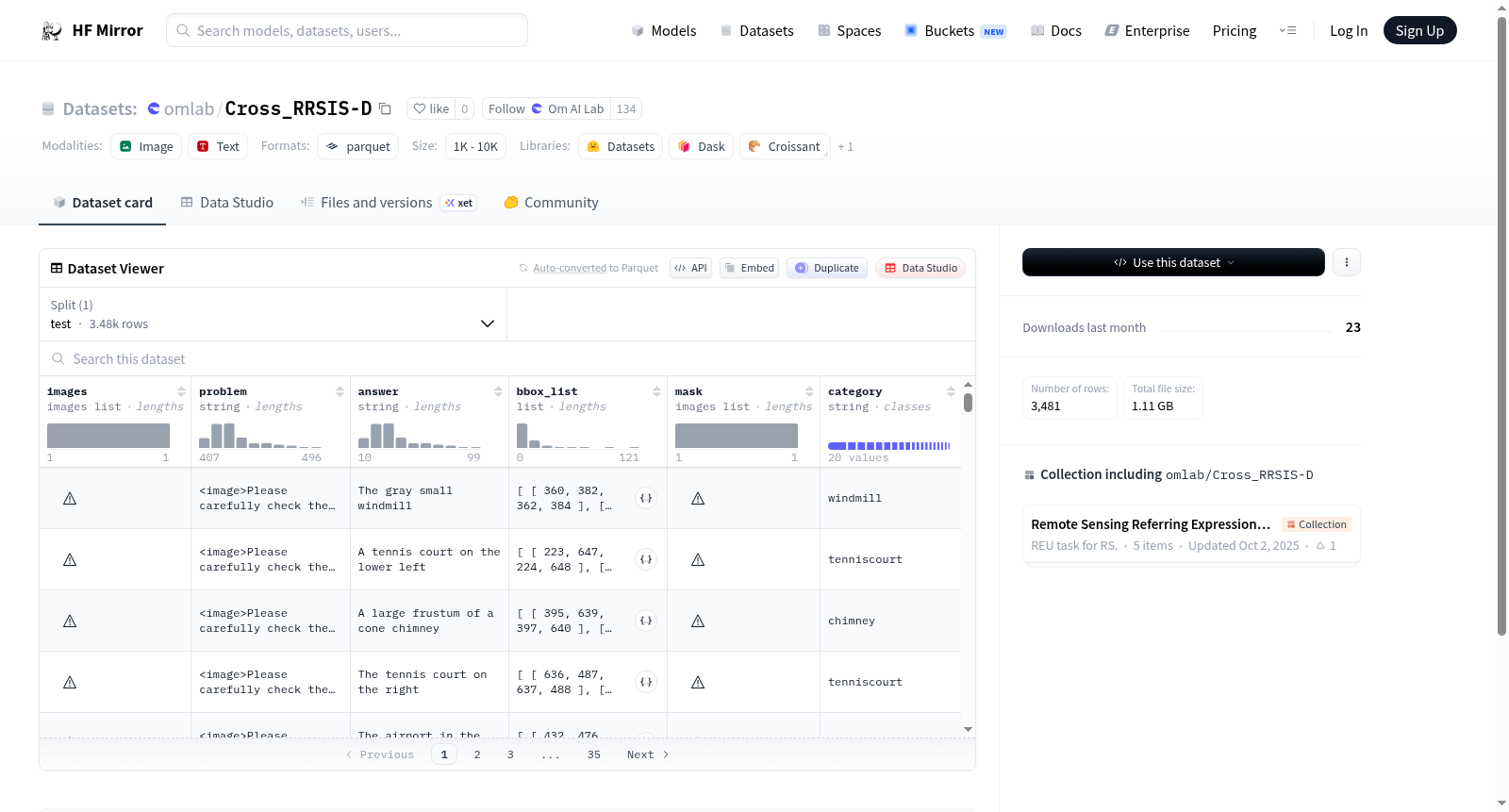
该数据集包含图像、问题、答案、边界框列表、掩码和类别信息。图像和掩码是图像类型的特征,问题、答案和类别是字符串类型的特征,边界框列表是一个由整数构成的列表的列表。数据集还提供了配置信息,指明了测试数据的位置。
The dataset includes features such as images, problems, answers, bounding box lists, and categories. Images and masks are image-type features, problems, answers, and categories are string-type features, and bounding box lists are lists of lists of integers. The dataset also provides configuration information indicating the location of the test data.
提供机构:
omlab
搜集汇总
数据集介绍
构建方式
在遥感图像理解领域,精准的视觉定位与语义推理任务日益受到关注。omlab/Cross_RRSIS-D数据集专为跨模态遥感图像分割与指代理解而构建,其设计融合了多源标注信息。该数据集包含图像、文本问题、答案、边界框列表、掩码及类别标签等丰富特征,其中掩码与边界框为逐像素与区域级标注,确保空间信息的精细度。数据以HuggingFace标准格式组织,采用test单一划分,数据文件统一存放于data/test-*路径下,便于直接加载与评估。通过整合视觉与语言模态的对应关系,该数据集为研究指代式遥感图像分割提供了基准平台。
使用方法
使用该数据集时,研究者可通过HuggingFace的datasets库加载omlab/Cross_RRSIS-D配置,指定test划分即可获取完整样本。每条数据包含图像列表、文本型问题与答案、整型边界框列表、图像型掩码以及字符串类别。建议将掩码与边界框作为监督信号,结合问题文本训练跨模态分割模型。评估时,可基于答案字段与预测结果的匹配度衡量语言理解准确性,同时利用掩码与边界框计算分割与检测性能指标。该数据集天然适配于指代式图像分割、视觉问答及多任务学习等研究方向。
背景与挑战
背景概述
在遥感图像理解领域,精准定位与分割特定目标始终是核心挑战之一,尤其是在复杂地理场景中。omlab/Cross_RRSIS-D数据集由多机构研究人员于近期创建,旨在推动跨模态遥感图像分割与实例搜索的交叉研究。该数据集聚焦于将自然语言描述与遥感图像中的目标区域进行语义对齐,核心研究问题在于如何利用语言线索实现零样本或少样本下的高精度目标定位与分割。其影响力体现在为遥感领域提供了首个融合语言引导与像素级掩码标注的标准化评测基准,填补了现有数据集在跨模态细粒度理解方面的空白,为后续研究奠定了数据基础。
当前挑战
该数据集所解决的领域问题在于遥感图像中的目标通常尺度多变、背景复杂,传统基于视觉特征的方法难以适应多样化语义查询,而现有自然语言引导的分割方法多针对自然图像,在遥感场景下泛化能力不足。构建过程中面临的挑战包括:如何从海量遥感影像中筛选出语义明确且与语言描述高度匹配的样本,以及如何保证标注的边界框与掩码在亚米级分辨率下的精确性。此外,跨模态数据对齐的不一致性——即同一目标在不同描述下的语义偏移——也为数据集构建带来了显著困难。
常用场景
经典使用场景
在视觉与语言交叉领域,基于引用表达的指代分割任务长期面临一个关键瓶颈:模型在处理多目标场景中同一类别的多个实例时,常因缺乏全局推理能力而产生歧义。Cross_RRSIS-D数据集应运而生,其核心设计在于构建跨图像的一致性引用表达,使模型能够学习同一物体在不同视角、光照和背景下的鲁棒语义表征。该数据集被广泛应用于训练和评估具备跨图像泛化能力的指代分割模型,尤其适用于需要联合理解自然语言指令与视觉上下文的多模态推理场景,成为检验模型是否真正理解“所指”而非仅匹配局部特征的重要基准。
解决学术问题
该数据集精准回应了当前指代分割研究中长期存在的跨实例混淆与语言歧义难题。传统数据集多局限于单张图像内的物体定位,忽视了自然语言中引用表达在跨图像场景下的语义一致性。Cross_RRSIS-D通过引入跨图像的引用表达对,使得研究者能够系统探究模型在保持指代语义不变的前提下,对同一物体在不同视觉条件下进行稳定分割的能力。这一设计显著推动了多模态对齐与视觉推理的学术进展,为构建更具泛化性的视觉定位模型提供了关键数据支撑,并催生了一系列关于语义不变性表征与跨域迁移学习的新理论探索。
实际应用
在实际应用中,Cross_RRSIS-D所定义的任务范式直接服务于需要人机自然交互的智能系统。例如,在智能驾驶场景中,用户可通过自然语言指令如“前方那辆白色SUV”来精准锁定目标,即便车辆处于不同角度或光照环境下;在机器人抓取与操作领域,机器人可依据跨图像的引用表达理解用户所指的特定物体,从而在动态环境中完成精准作业。此外,该数据集还可赋能智能相册检索与视频监控中的目标追踪,使得系统能够跨越不同画面持续识别同一语义个体,大幅提升了人机协作的流畅性与准确性。
数据集最近研究
最新研究方向
在视觉语言导航与多模态推理的前沿领域,omlab/Cross_RRSIS-D数据集聚焦于跨模态指代分割与推理任务,其设计融合了图像、自然语言问题、边界框及掩码标注,为智能体在复杂场景中理解空间语义关系提供了关键基准。近期研究热点围绕该数据集推动的跨域泛化能力,尤其是结合大规模预训练模型(如CLIP、SAM)实现零样本或少样本的指代分割,以及应对遮挡、光照变化等挑战的鲁棒性提升。该数据集与具身智能、人机交互中的实时场景理解紧密关联,例如在机器人抓取或自动驾驶中解析模糊指令。其意义在于弥合语言描述与视觉定位的鸿沟,促进多模态系统在动态环境下的认知对齐,为下一代通用人工智能的视觉推理能力评估树立了重要标杆。
以上内容由遇见数据集搜集并总结生成


