PoLaRIS
收藏github2024-09-27 更新2024-09-28 收录
下载链接:
https://github.com/sparolab/PoLaRIS
下载链接
链接失效反馈官方服务:
资源简介:
PoLaRIS数据集是一个用于海上环境中物体检测和跟踪的数据集,特别关注于Pohang运河的场景。该数据集提供多模态注释,目前提供00和01序列的注释,未来将提供所有序列的注释。
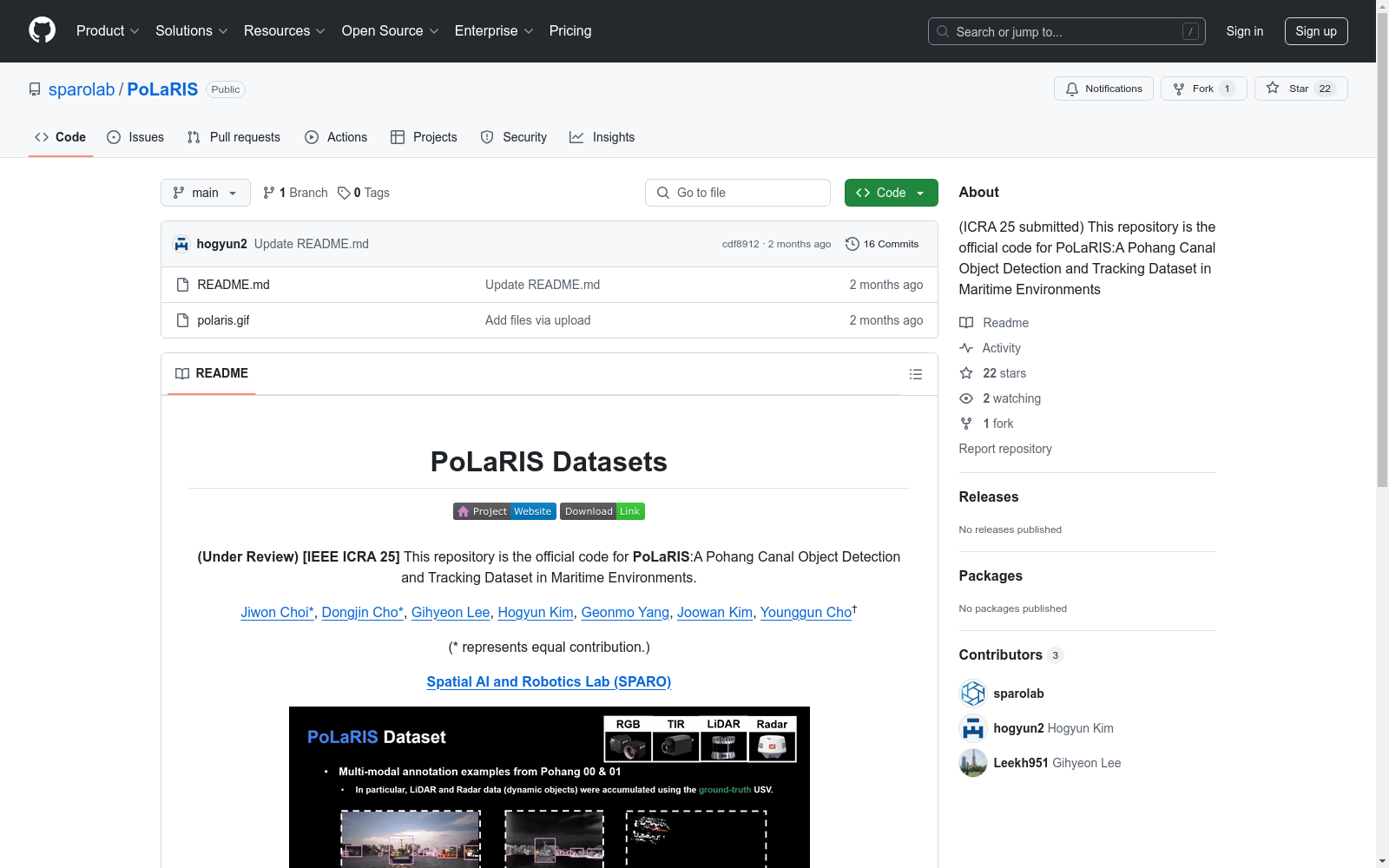
The PoLaRIS dataset is a dataset for object detection and tracking in maritime environments, with a specific focus on scenarios in the Pohang Canal. This dataset provides multimodal annotations; currently, annotations for sequences 00 and 01 are available, and annotations for all sequences will be provided in the future.
创建时间:
2024-09-27
原始信息汇总
PoLaRIS Datasets
概述
PoLaRIS: 一个在海上环境中用于物体检测和跟踪的Pohang Canal数据集。
作者
- Jiwon Choi*
- Dongjin Cho*
- Gihyeon Lee
- Hogyun Kim
- Geonmo Yang
- Joowan Kim
- Younggun Cho†
(* 表示同等贡献)
下载
- 下载链接
- 目前提供00和01序列的多模态标注。在审查过程后,将提供所有序列的标注。
特别感谢
- Pohang Canal Dataset
- Field Scale (TIR normalization)
- GSAD (RGB Night to Day)
致谢
- 感谢Prof. Jinhwan Kim的MORIN group,特别是Dongha Chung,发布了Pohang Canal Dataset。
搜集汇总
数据集介绍
构建方式
在构建PoLaRIS数据集时,研究团队精心设计了多模态数据采集方案,涵盖了Pohang Canal这一特定水域环境中的物体检测与跟踪任务。通过集成多种传感器技术,包括视觉和红外成像设备,数据集不仅捕捉了日间和夜间的视觉信息,还纳入了热成像数据,以确保在不同光照和天气条件下数据的全面性。此外,数据集的标注过程严格遵循行业标准,确保了标注的准确性和一致性,为后续的算法训练和评估提供了坚实的基础。
特点
PoLaRIS数据集的显著特点在于其多模态数据的丰富性和环境适应性。该数据集不仅包含了高分辨率的RGB图像,还融合了热成像数据,使得在复杂的水域环境中,如夜间或恶劣天气条件下,仍能有效进行物体检测和跟踪。此外,数据集的标注精细,涵盖了多种常见的水上物体,如船只、浮标等,为研究者提供了多样化的训练和测试样本。
使用方法
使用PoLaRIS数据集时,研究者可以通过提供的下载链接获取数据集文件,并根据需要选择特定的序列进行分析。数据集的结构设计便于用户快速加载和处理,支持多种常见的数据处理和机器学习框架。用户可以利用该数据集进行物体检测、跟踪算法的训练和评估,特别是在水域环境中的应用。此外,数据集还提供了详细的文档和示例代码,帮助用户快速上手并进行深入研究。
背景与挑战
背景概述
PoLaRIS数据集,由Spatial AI and Robotics Lab (SPARO)主导,旨在为海事环境中的物体检测与跟踪提供一个全面的基准。该数据集由Jiwon Choi、Dongjin Cho、Gihyeon Lee、Hogyun Kim、Geonmo Yang、Joowan Kim和Younggun Cho等研究人员共同创建,预计将在IEEE ICRA 25会议上正式发布。PoLaRIS数据集的核心研究问题聚焦于复杂海事场景下的多模态数据处理,旨在提升无人船和自主导航系统在实际应用中的性能。该数据集的发布预期将对海事自动化和智能导航领域产生深远影响,为相关研究提供宝贵的实验数据和评估标准。
当前挑战
PoLaRIS数据集在构建过程中面临多重挑战。首先,海事环境的高度动态性和复杂性使得数据采集和标注变得异常困难。其次,多模态数据的融合与处理,包括图像、雷达和声纳数据,要求高度精确的算法和强大的计算能力。此外,数据集的规模和多样性也带来了存储和传输的挑战。最后,由于海事环境的特殊性,数据集的实时更新和维护也是一个持续的挑战,以确保其能够反映最新的海事动态和技术进展。
常用场景
经典使用场景
在海洋环境中,PoLaRIS数据集的经典使用场景主要集中在对象检测与跟踪任务上。该数据集通过提供丰富的多模态数据,包括视觉图像和传感器数据,为研究者提供了一个全面的平台,以开发和验证在复杂水下环境中进行目标识别和轨迹跟踪的算法。这些算法不仅能够提升无人水下航行器(AUV)和遥控水下航行器(ROV)的自主导航能力,还能增强其在海洋资源勘探、环境监测和军事应用中的实用性。
衍生相关工作
PoLaRIS数据集的发布催生了多项相关经典工作。例如,基于该数据集的研究成果,研究者开发了多种先进的对象检测和跟踪算法,这些算法在多个国际竞赛中取得了优异成绩。此外,PoLaRIS数据集还激发了多篇高影响力的学术论文,涵盖了从基础理论到实际应用的广泛领域。这些研究不仅推动了水下机器人技术的发展,还为其他相关领域的研究提供了宝贵的参考和借鉴。
数据集最近研究
最新研究方向
在海洋环境监测领域,PoLaRIS数据集的最新研究方向主要集中在多模态对象检测与跟踪技术的融合上。该数据集通过整合多种传感器数据,如RGB图像、热成像和激光雷达,为研究人员提供了一个全面的平台,以探索复杂水下环境中的目标识别与跟踪问题。这一研究方向不仅有助于提升无人船和水下机器人在实际应用中的自主导航能力,还为海洋生态监测和灾害预警系统提供了关键技术支持。通过多模态数据的协同分析,研究人员能够更准确地识别和跟踪水下目标,从而推动海洋科学和工程技术的进步。
以上内容由遇见数据集搜集并总结生成


