Oxford Inertial Odometry Dataset (OxIOD)
收藏arXiv2018-09-20 更新2024-06-21 收录
下载链接:
http://deepio.cs.ox.ac.uk
下载链接
链接失效反馈官方服务:
资源简介:
Oxford Inertial Odometry Dataset (OxIOD) 是由牛津大学计算机科学系创建的一个专门用于惯性测距研究的数据集。该数据集包含158个序列,总距离超过42公里,远大于之前的惯性数据集。OxIOD的特点在于其多样性,能够反映手机基IMU在日常使用中的复杂运动。数据收集涉及四种不同的附件(手持、口袋、手提包和手推车),四种运动模式(停止、慢走、正常行走和跑步),五种不同用户和四种消费级手机类型。数据集的创建过程中,使用了高精度的运动捕捉系统进行标记,旨在通过深度神经网络模型解决惯性导航中的漂移问题,适用于训练和评估基于学习的和基于模型的算法。
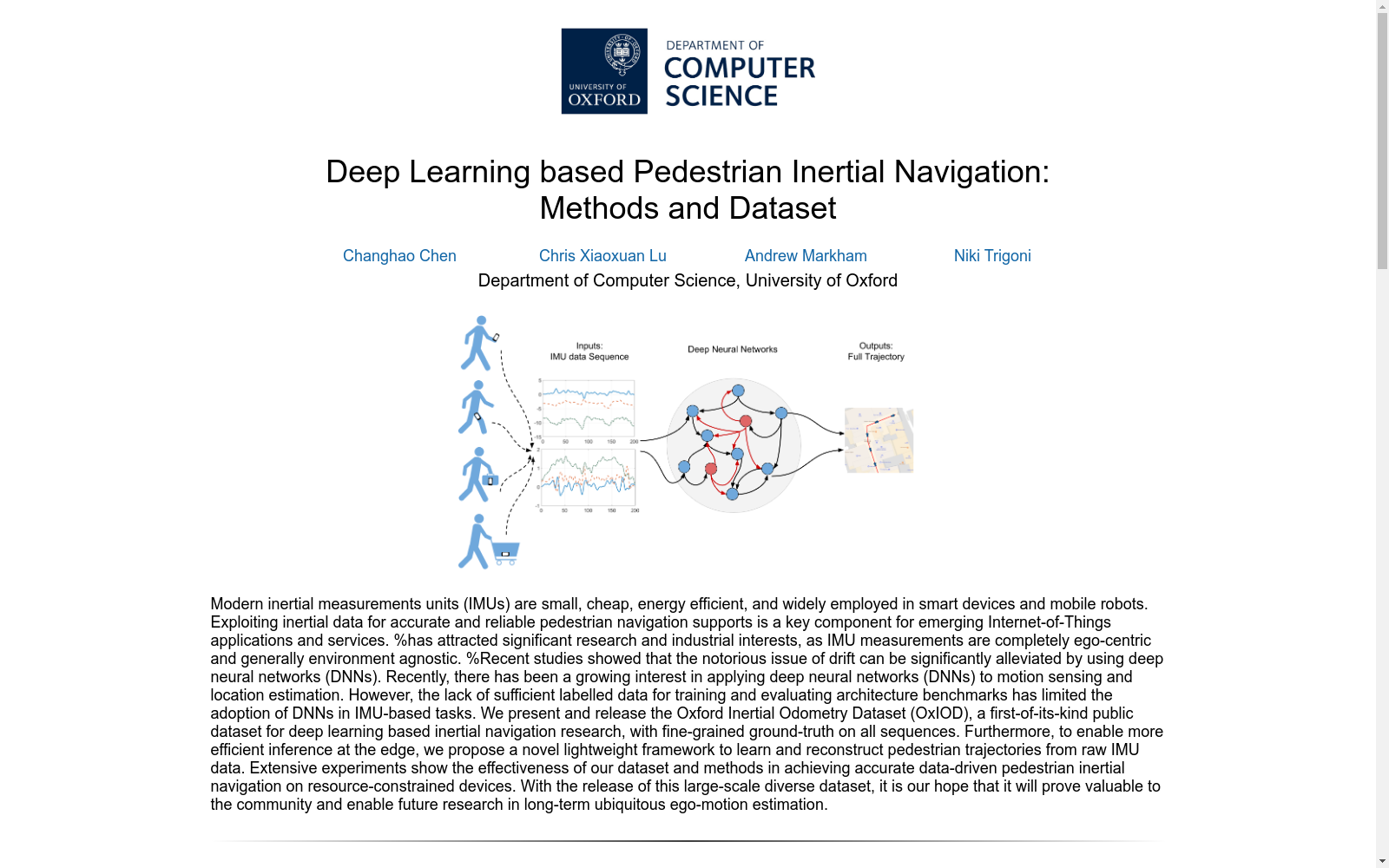
The Oxford Inertial Odometry Dataset (OxIOD) is a specialized dataset dedicated to inertial odometry research, created by the Department of Computer Science, University of Oxford. It includes 158 sequences with a total distance exceeding 42 kilometers, which is far larger than previous inertial datasets. The key feature of OxIOD is its diversity, which can reflect the complex motions of cell-phone-based IMUs during daily use. Data collection involves four different mounting scenarios: handheld, in a pocket, in a handbag, and on a trolley, four motion modes: stationary, slow walking, normal walking, and running, five distinct users, and four consumer-grade smartphone models. During the dataset creation process, a high-precision motion capture system was used for ground-truth labeling. It aims to solve the drift problem in inertial navigation via deep neural network models, and is applicable for training and evaluating both learning-based and model-based algorithms.
提供机构:
牛津大学计算机科学系
创建时间:
2018-09-20
搜集汇总
数据集介绍
构建方式
Oxford Inertial Odometry Dataset (OxIOD) 的构建旨在为基于深度学习的惯性导航研究提供一个全面的公共数据集。该数据集通过在多种场景下收集大量行人惯性测量单元 (IMU) 数据来实现这一目标。数据收集涉及不同的设备(如 iPhone 7 Plus、iPhone 6、iPhone 5 和 Nexus 5),不同的用户(共五名参与者),以及不同的运动模式(如停止、缓慢行走、正常行走和跑步)。此外,数据收集还在不同的设备附着位置(如手持、口袋、手袋和推车)下进行。为了确保数据的质量和准确性,研究人员使用了高精度的 Vicon 运动捕捉系统来提供运动标签。这些数据被收集在两个不同的环境中,包括室内 Vicon 室和大型办公室楼层,以反映现实生活中的运动多样性。为了进一步丰富数据集,研究人员还收集了不同运动模式的行人数据,并确保数据涵盖了广泛的运动速度,包括缓慢行走、正常行走和跑步。最后,为了验证数据集的泛化能力,研究人员还进行了一项大规模定位实验,在办公室建筑的多个楼层上收集了数据。
特点
OxIOD 数据集具有几个显著特点,使其成为深度学习惯性导航研究的宝贵资源。首先,该数据集包含了大量的数据,共有 158 个序列,总行程超过 42 公里。这使得 OxIOD 成为迄今为止最大的惯性导航数据集之一,为深度学习模型提供了充足的数据进行训练和评估。其次,该数据集提供了细粒度的地面真实标签,包括位置、速度和方向,为评估模型的性能提供了准确的标准。此外,OxIOD 数据集还涵盖了多种设备和用户的运动数据,从而确保了惯性导航模型在不同情况下的鲁棒性。最后,该数据集还包含了在室内和室外环境下收集的数据,进一步增强了模型的泛化能力。
使用方法
使用 OxIOD 数据集进行深度学习惯性导航研究的方法包括以下步骤。首先,数据集需要被分割成训练集和测试集。然后,可以使用各种深度学习模型,如 Inertial Odometry Neural Networks (IONet) 或 Lightweight Inertial Odometry Neural Networks (L-IONet),在训练集上训练。在训练过程中,模型通过最小化预测值和地面真实标签之间的均方误差来优化其参数。训练完成后,可以使用测试集来评估模型的性能。此外,为了提高模型的泛化能力,还可以使用数据增强技术,如数据混合或数据转换。最后,为了验证模型的实际应用能力,可以在低功耗设备上部署模型,并使用真实数据进行测试。
背景与挑战
背景概述
随着物联网(IoT)设备的普及,惯性测量单元(IMU)因其小型、低廉、节能的特点而广泛应用于智能手机、可穿戴设备以及移动机器人中。利用IMU数据实现准确可靠的行人导航对于物联网应用和服务至关重要。近年来,深度神经网络(DNN)在运动感知和位置估计领域的应用日益增多。然而,由于缺乏足够的带标签数据来训练和评估架构基准,DNN在IMU相关任务中的应用受到限制。为此,牛津大学计算机科学系的研究人员Changhao Chen等人于2018年创建了牛津惯性里程计数据集(OxIOD),这是首个用于基于深度学习的惯性导航研究的公共数据集,所有序列都包含细粒度的地面真实值。此外,为了在边缘设备上实现更高效的推理,他们提出了一种轻量级框架,用于从原始IMU数据中学习和重建行人轨迹。实验表明,该数据集和方法在资源受限的设备上实现了准确的数据驱动行人惯性导航。
当前挑战
OxIOD数据集在行人惯性导航领域面临的主要挑战包括:1)缺乏足够的带标签数据,这对于训练和评估深度神经网络模型至关重要;2)在低功耗设备上部署深度学习模型时,模型效率成为一个关键问题,因为需要在保证准确性的同时降低计算和内存消耗;3)缺乏通用的评估基准,难以对不同的技术进行公平和客观的比较。为了应对这些挑战,研究人员提出了轻量级惯性里程计神经网络(L-IONet)框架,该框架在保证准确性的同时,大大提高了训练和推理速度,使其能够在低功耗设备上实时运行。此外,OxIOD数据集的发布为行人惯性导航研究提供了宝贵的数据资源,有助于推动数据驱动方法的应用和评估基准的建立。
常用场景
经典使用场景
Oxford Inertial Odometry Dataset (OxIOD) 是一个专门为基于深度学习的惯性导航研究而设计的公共数据集。它包含了大量的行人惯性测量单元(IMU)数据,以及精细的地面真实值,用于所有序列。该数据集被广泛用于训练和评估深度学习模型,以实现准确和可靠的人体导航支持。此外,OxIOD 数据集还用于研究和开发轻量级的深度学习框架,以实现高效的地缘边推断。这些框架能够从原始 IMU 数据中学习和重建行人轨迹,从而支持新兴的物联网应用和服务。
实际应用
OxIOD 数据集在实际应用场景中具有广泛的应用价值。它被用于开发智能设备中的惯性导航系统,支持室内定位、健康监测、活动识别和游戏体验等功能。此外,OxIOD 数据集还被用于开发移动机器人中的导航和抓取任务,以及无人机和自动驾驶汽车中的定位和轨迹分析。这些应用场景都依赖于 OxIOD 数据集提供的准确和可靠的惯性导航支持。
衍生相关工作
OxIOD 数据集衍生了多项相关经典工作。例如,Light Inertial Odometry Neural Networks (L-IONet) 是一个轻量级的深度学习框架,用于高效地学习和推断惯性导航。L-IONet 采用了因果扩张卷积层,能够处理长连续信号,并实现了实时推断。此外,OxIOD 数据集还被用于开发其他深度学习模型,例如 Inertial Odometry Neural Networks (IONet),用于从原始 IMU 数据中学习和重建行人轨迹。这些相关工作都证明了 OxIOD 数据集在深度学习研究中的重要性,并为未来的惯性导航研究提供了宝贵的资源。
以上内容由遇见数据集搜集并总结生成


