V2X-Radar
收藏V2X-Radar 数据集概述
数据集基本信息
- 数据集名称:V2X-Radar
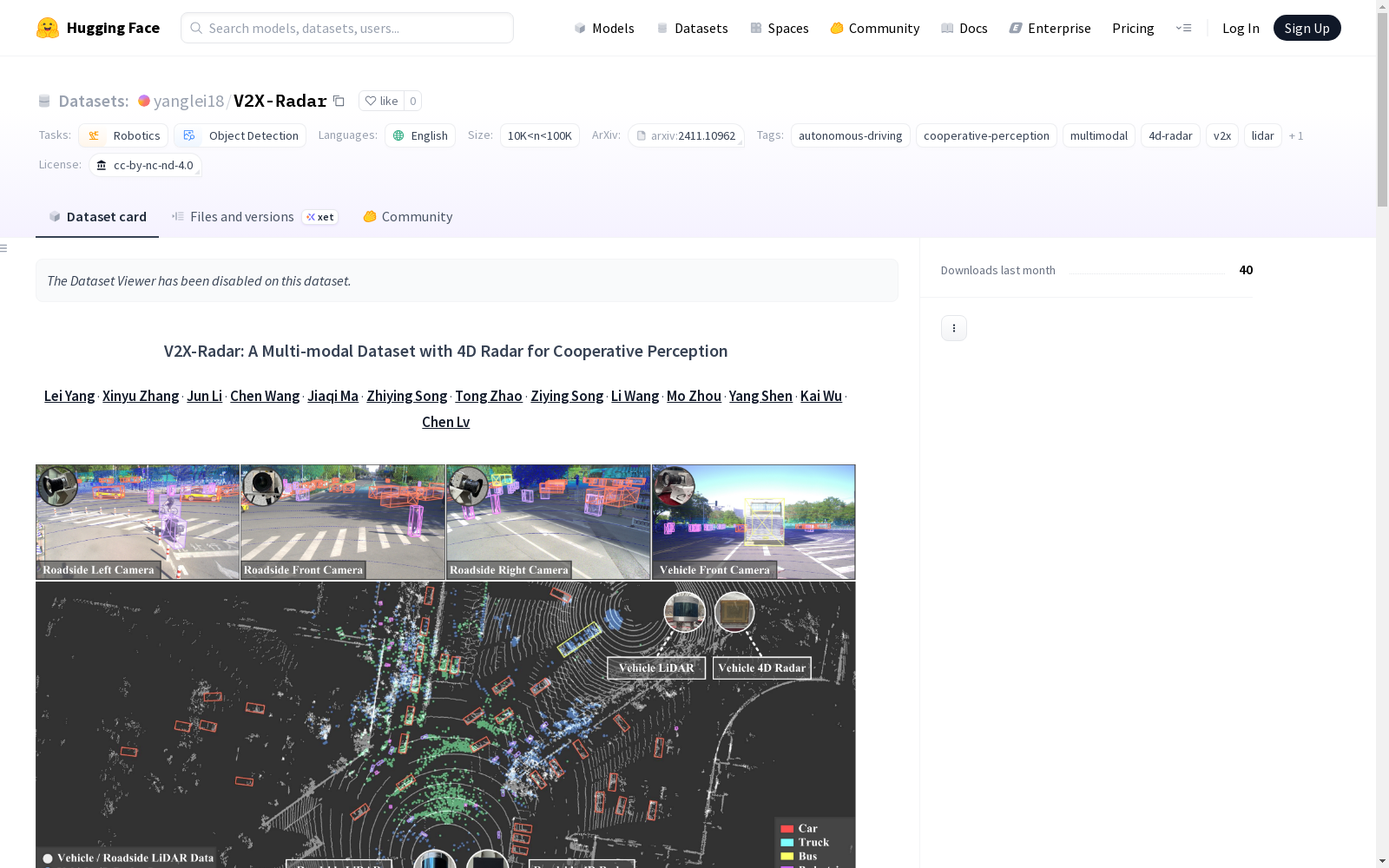
- 全称:V2X-Radar: A Multi-modal Dataset with 4D Radar for Cooperative Perception
- 论文状态:NeuIPS 2025 Spotlight
- 语言:英语
- 许可证:CC BY-NC-ND 4.0
- 数据规模:10K<n<100K
- 标注创建者:专家标注
核心特征
- 首个公开数据集:集成4D成像雷达、LiDAR和多视角相机
- 多模态数据:4D雷达、激光雷达、摄像头
- V2X配置:车联网环境
- 应用场景:复杂城市交叉路口
- 数据来源:中国大陆城市
支持任务
- 3D目标检测(雷达/LiDAR/相机/V2X融合)
- 协同感知(V2V/V2I/V2X)
- 时间错位和通信延迟基准测试
- 领域自适应和传感器鲁棒学习
数据集结构
V2X-Radar-I(KITTI格式)
training/ ├── velodyne ├── radar ├── calib ├── image_1 ├── image_2 ├── image_3 └── label_2 ImageSets/ ├── train.txt ├── trainval.txt ├── val.txt └── test.txt
V2X-Radar-V(KITTI格式)
training/ ├── velodyne ├── radar ├── calib ├── image_2 └── label_2 ImageSets/ ├── train.txt ├── trainval.txt ├── val.txt └── test.txt
V2X-Radar-C(OpenV2V格式)
train/ ├── 2024-05-15-16-28-09 │ ├── -1(路侧单元) │ │ ├── 00000.pcd - 00250.pcd │ │ ├── 00000_radar.pcd - 00250_radar.pcd │ │ ├── 00000.yaml - 00250.yaml │ │ ├── 00000_camera0.jpg - 00250_camera0.jpg │ │ ├── 00000_camera1.jpg - 00250_camera1.jpg │ │ └── 00000_camera2.jpg - 00250_camera2.jpg │ └── 142(车侧单元) validate/ test/
数据字段
| 字段 | 类型 | 描述 |
|---|---|---|
| radar_points | 浮点数数组 | 4D雷达点云(x, y, z, doppler, intensity) |
| lidar_points | 浮点数数组 | LiDAR点云 |
| images | 图像列表 | 多视角RGB帧 |
| calibration | 字典 | 内参+外参 |
| timestamp | 浮点数 | 绝对时间戳(毫秒) |
| annotations | 字典 | 3D边界框、类别和轨迹ID |
数据收集与处理
- 地理覆盖:中国大都市
- 采集设备:研究许可车辆和路侧单元
- 隐私处理:手动匿名化和隐私过滤
- 数据合规:符合中国数据出口法规
许可信息
- 许可证类型:CC BY-NC-ND 4.0
- 署名要求:必须注明"V2X-Radar Dataset, 2025"
- 使用限制:仅限研究和教育用途
- 衍生限制:禁止分发修改版本
- 完整许可证:https://creativecommons.org/licenses/by-nc-nd/4.0/
引用格式
bibtex @article{yang2024v2x, title={V2X-Radar: A Multi-modal Dataset with 4D Radar for Cooperative Perception}, author={Yang, Lei and Zhang, Xinyu and Li, Jun and Wang, Chen and Ma, Jiaqi and Song, Zhiying and Zhao, Tong and Song, Ziying and Wang, Li and Zhou, Mo and Shen, Yang and Lv, Chen}, journal={Advances in Neural Information Processing Systems (NeurIPS)}, year={2025} }