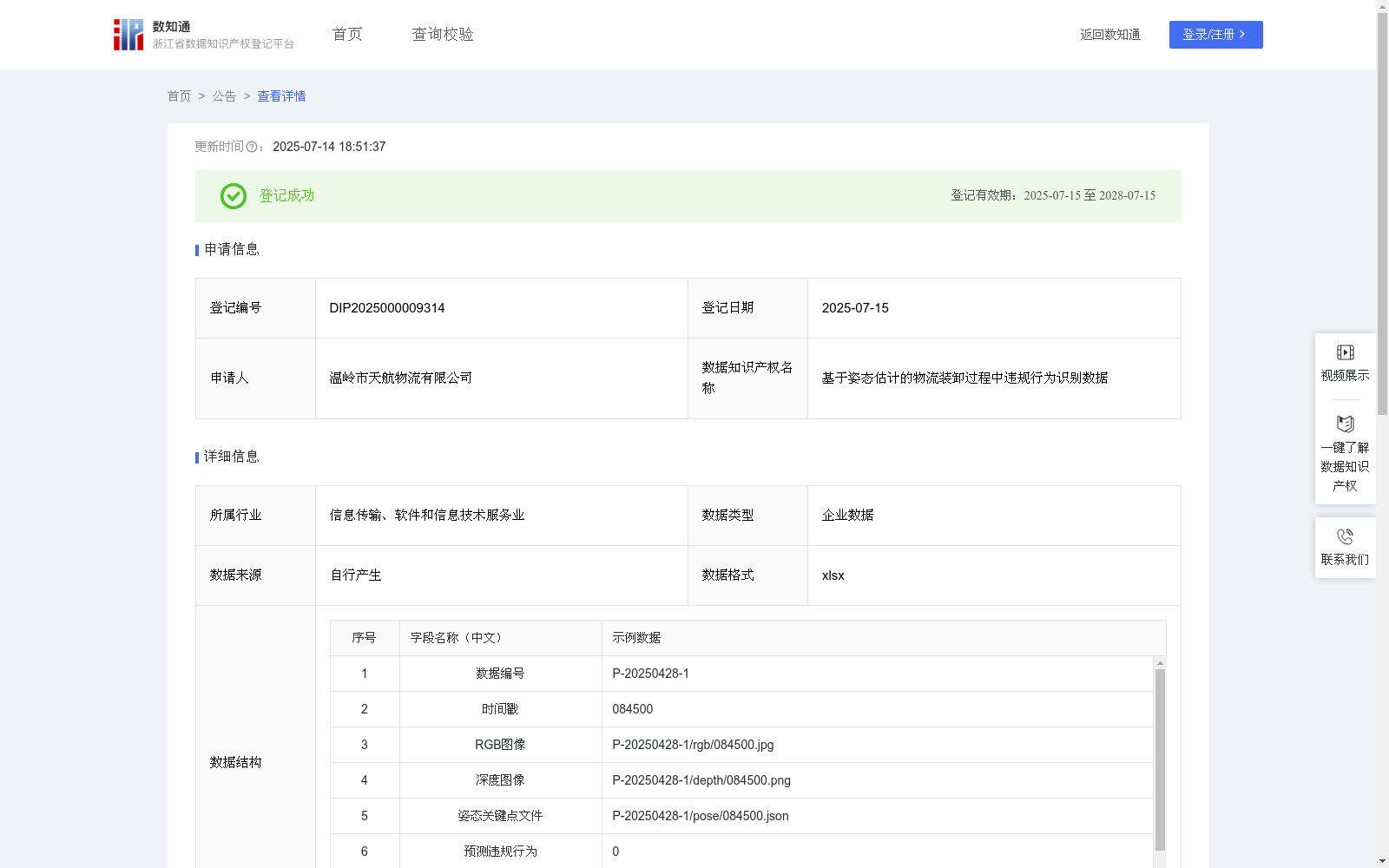
基于姿态估计的物流装卸过程中违规行为识别数据
收藏浙江省数据知识产权登记平台2025-07-14 更新2025-07-15 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/148731
下载链接
链接失效反馈官方服务:
资源简介:
该数据集通过采集装卸作业中的工人姿态与动作数据,结合姿态估计算法,识别装卸过程中的违规行为(如超负荷搬运、不当弯腰、频繁重复动作等)。该数据适用于仓储物流、制造业等领域,通过对工人动态姿态的实时监测,能够有效降低因不规范作业引发的职业伤害,并提高作业安全性。用户可利用该数据建立违规行为识别模型,实时预警违规行为,促进企业安全生产管理。本系统基于RGB与深度图双模态数据进行装卸违规行为识别。所有图像数据按监测批次编号P-XXX层级组织存储,其中XXX表示当天采集批次编号。RGB图像输入YOLOv8模型进行人体目标检测,输出人体的检测框和姿态关键点,并根据置信度筛选出可能的工人位置;深度图用于生成三维点云数据,通过点云分割和聚类算法提取工人的姿态信息。
姿态估计算法提取工人关节位置,并计算每个关节的姿态角度数据。角度字段包含每个时间戳下的关节角度数据。通过计算关节的角度变化(列表中分别为身体8个关节角度:腰部、膝部、颈部、左手小臂、左手大臂、右手小臂、右手大臂、胯部),结合先验的违规动作模型,判定工人是否进行不当弯腰或超负荷搬运等违规行为。
标签数据记录该时间段内是否存在违规行为(0:正常,1:违规)。在此过程中,具体的判断公式如下:
θ腰部 = arccos((cos(θ1) * cos(θ2)) + (sin(θ1) * sin(θ2))) // 计算腰部角度变化
θ膝部 = arccos((cos(θ1) * cos(θ2)) + (sin(θ1) * sin(θ2))) // 计算膝部角度变化
其中,θ1和θ2分别是前后两帧的腰部和膝部角度。如果θ腰部 > 30° 或 θ膝部 < 90°,则触发违规行为标记。
环境光照数据用于自适应调整曝光补偿,表示当前时刻的环境光照强度值。
所有姿态角度数据与环境光强度数据结合,输入到深度学习模型中(如Bi-LSTM或CNN),用于违规行为的识别。模型通过以下公式计算违规概率:
P_violated = σ(W * [pose_seq, angle_seq] + b)
其中,σ为Sigmoid激活函数,W为模型权重,b为偏置项,pose_seq为关节姿态序列,angle_seq为角度变化序列。若P_violated > 0.75,则系统判定当前动作为违规行为(1),否则为正常行为(0),在数据结构中字段名为“预测违规行为”。
数据文件中的时间戳编号遵循标准命名规则,例如`084500`表示08时45分00秒采集开始的30秒时间段。
This dataset collects worker posture and motion data during loading and unloading operations, and uses pose estimation algorithms to identify violations occurring in the process, including overloaded carrying, improper bending, frequent repetitive movements, and other cases.
This data is applicable to fields such as warehousing, logistics and manufacturing. Through real-time monitoring of workers' dynamic postures, it can effectively reduce occupational injuries caused by non-standard operations and improve operation safety. Users can use this dataset to build violation behavior recognition models, conduct real-time early warning of violations, and promote safe production management of enterprises.
This system conducts loading and unloading violation recognition based on dual-modal data of RGB and depth maps. All image data are organized and stored in a hierarchical structure named by monitoring batch number P-XXX, where XXX represents the daily collection batch number.
RGB images are input into the YOLOv8 model for human target detection, which outputs human bounding boxes and pose keypoints, and filters out possible worker positions based on confidence; depth maps are used to generate 3D point cloud data, and worker posture information is extracted through point cloud segmentation and clustering algorithms.
The pose estimation algorithm extracts the positions of workers' joints and calculates the posture angle data of each joint. The angle field contains the joint angle data at each timestamp. By calculating the angle changes of the joints (the list includes the angle data of 8 body joints: waist, knee, neck, left forearm, left upper arm, right forearm, right upper arm, and hip), combined with the prior violation action model, it is determined whether the worker has committed violations such as improper bending or overloaded carrying.
The label data records whether there is a violation during this time period (0: normal, 1: violation). The specific judgment formulas are as follows:
θ_waist = arccos((cos(θ₁) * cos(θ₂)) + (sin(θ₁) * sin(θ₂))) // Calculate the change in waist angle
θ_knee = arccos((cos(θ₁) * cos(θ₂)) + (sin(θ₁) * sin(θ₂))) // Calculate the change in knee angle
Where θ₁ and θ₂ are the waist and knee angles of the previous and current frames respectively. If θ_waist > 30° or θ_knee < 90°, the violation flag is triggered.
Ambient light data is used to adaptively adjust exposure compensation, representing the ambient light intensity value at the current moment.
All posture angle data and ambient light intensity data are combined and input into deep learning models (such as Bi-LSTM or CNN) for violation behavior recognition. The model calculates the violation probability through the following formula:
P_{violated} = σ(W * [pose_seq, angle_seq] + b)
Where σ is the Sigmoid activation function, W is the model weight, b is the bias term, pose_seq is the joint posture sequence, and angle_seq is the angle change sequence. If P_{violated} > 0.75, the system determines that the current action is a violation (1), otherwise it is a normal action (0), and the field name in the data structure is "predicted violation behavior".
The timestamp number in the data file follows standard naming rules, for example, `084500` represents a 30-second time period starting from the collection at 08:45:00.
提供机构:
温岭市天航物流有限公司
创建时间:
2025-06-25
搜集汇总
数据集介绍
背景与挑战
背景概述
该数据集是一个基于姿态估计的物流装卸过程中违规行为识别数据集,包含3210条记录,涵盖RGB图像、深度图像、姿态关键点等多模态数据。通过分析工人姿态角度和环境光照等数据,识别如超负荷搬运、不当弯腰等违规行为,适用于仓储物流和制造业的安全生产管理。
以上内容由遇见数据集搜集并总结生成


