NavSpace
收藏github2025-09-30 更新2025-10-11 收录
下载链接:
https://github.com/TidalHarley/NavSpace
下载链接
链接失效反馈官方服务:
资源简介:
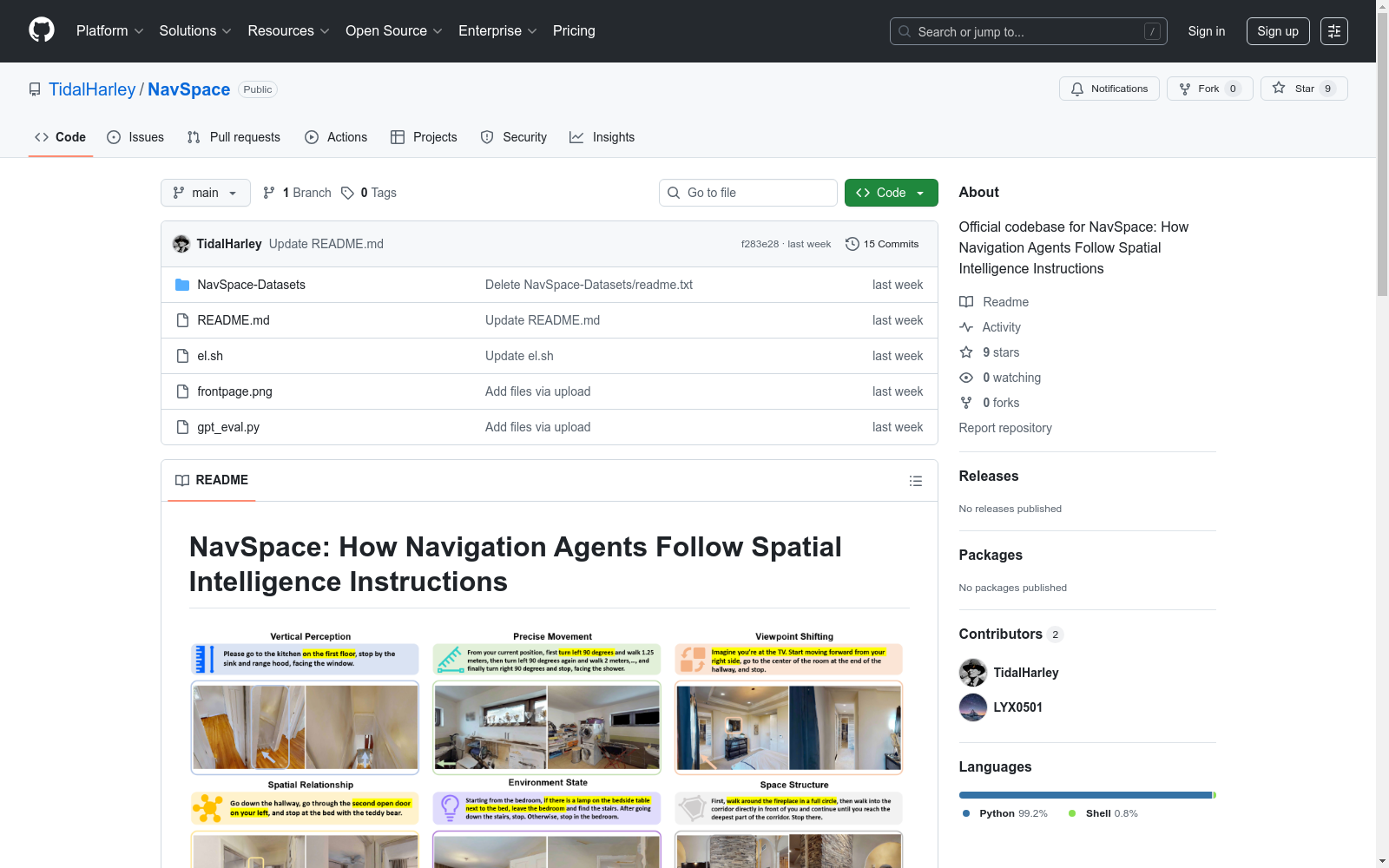
NavSpace数据集是一个用于评估导航代理空间智能的基准数据集,包含6个子任务类别和1,228个轨迹-指令对,旨在系统性地测试导航代理的空间感知和推理能力。数据集涵盖环境状态、空间结构、精确移动、视角转换、垂直感知和空间关系等任务,提供多种JSON文件格式以支持不同导航模型的需求。
The NavSpace dataset is a benchmark dataset for evaluating the spatial intelligence of navigation agents. It comprises 6 subtask categories and 1,228 trajectory-instruction pairs, aiming to systematically test the spatial perception and reasoning capabilities of navigation agents. The dataset covers tasks including environmental states, spatial structure, precise movement, perspective transformation, vertical perception, and spatial relations, and provides multiple JSON file formats to support the requirements of different navigation models.
创建时间:
2025-09-29
原始信息汇总
NavSpace数据集概述
数据集简介
NavSpace是一个用于评估导航代理空间智能的视觉语言导航基准数据集,专注于系统评估导航代理的空间感知和推理能力。
数据集规模
- 总轨迹-指令对数量:1,228个
- 任务类别数量:6个
任务类别分布
| 任务类别 | 环境状态 | 空间结构 | 精确移动 | 视点切换 | 垂直感知 | 空间关系 | 总计 |
|---|---|---|---|---|---|---|---|
| 样本数量 | 200 | 200 | 201 | 207 | 208 | 212 | 1,228 |
文件结构
每个子文件夹包含三种JSON文件格式:
文件类型说明
-
_vln.json
- 标准视觉语言导航模型格式
- 包含完整回合信息:坐标、指令、路径等
- 作为数据一致性验证的基准文件
-
_action.json
- 包含真实动作序列
- 核心字段与vln.json完全一致
- 额外包含详细动作序列和参考路径
-
_with_tokens.json
- 为轻量级导航模型设计的预分词格式
- 提供预分词指令文本以提高处理效率
- 场景路径可能与其他文件不同
动作定义
- forward:直线前进0.25米
- left/right:向左或向右旋转30°
- look-up/look-down:相机向上或向下倾斜30°
- backward:向后移动0.25米
- stop:轨迹结束
数据一致性
- 所有文件在核心字段上保持一致:episode_id、instruction_text、坐标、目标点等
- 由于环境差异,scene_id路径可能不同,但场景文件名相同
- 通过验证程序确保数据完整性
使用建议
- 使用validate_dataset_integrity.py验证数据完整性
- 使用*_vln.json作为数据比较基准
- 根据模型需求选择合适的数据格式
评估框架
- 评估程序为gpt_eval.py,需要GPT API密钥
- 运行评估过程需执行bash脚本el.sh
- 其他评估方法即将发布
搜集汇总
数据集介绍
构建方式
在具身智能研究领域,导航任务的空间认知能力评估长期面临体系化缺失。NavSpace数据集通过构建六类空间推理任务框架,系统整合了1,228条轨迹-指令对。其构建过程采用多维度空间能力解构方法,将导航场景划分为环境状态感知、空间结构理解等六个子任务模块,每个模块均通过专业标注团队在仿真环境中采集真实轨迹数据,并采用三重JSON格式校验机制确保数据结构一致性。
特点
该数据集最显著的特征在于其空间智能评估的体系化设计。六类子任务分别针对导航智能体的垂直感知、视角转换等核心空间能力进行专项测评,每个轨迹节点均包含精确的坐标定位与动作序列标注。数据文件采用三种标准化格式并行存储,既保留传统VLN模型所需的完整路径信息,又提供预分词格式以适配轻量化模型,同时通过动作定义标准化确保了跨模型评估的公平性。
使用方法
研究者可根据具体需求灵活选用数据格式:基础研究推荐使用_vln.json文件作为基准数据源,动作序列分析可调用_action.json获取真实动作轨迹,轻量化模型开发则适用_with_tokens.json的预分词格式。使用前建议运行完整性验证脚本确保数据质量,评估阶段可通过GPT接口的评估框架进行多维度性能测试,为导航智能体的空间认知能力提供量化评估基准。
背景与挑战
背景概述
导航智能体在具身智能领域扮演着关键角色,传统基准多聚焦于语义理解而忽视空间感知能力。NavSpace数据集由研究团队于2023年推出,通过六类空间任务和1,228条轨迹指令对,系统评估导航智能体的空间推理能力。该数据集填补了空间智能验证的空白,为22种主流导航模型提供标准化测试平台,推动具身导航向多维智能方向发展。
当前挑战
在解决空间导航任务时,智能体需应对复杂的三维环境感知、多模态指令对齐、以及动态路径规划等核心难题。数据构建过程中面临空间关系标注一致性、多视角轨迹对齐、以及跨环境泛化能力验证等挑战,需通过严格的坐标校验和动作序列标准化来保障数据质量。
常用场景
经典使用场景
在具身智能导航领域,NavSpace数据集通过六类空间推理任务系统评估导航代理的感知与决策能力。该数据集模拟真实环境中的轨迹-指令对,要求代理执行精确移动、视角转换及垂直空间感知等操作,为模型训练与基准测试提供了标准化平台。其结构化设计使得研究者能够深入探究导航代理在复杂空间场景下的行为模式,推动了视觉语言导航技术的精细化发展。
解决学术问题
NavSpace有效解决了传统导航基准过度依赖语义理解而忽视空间智能的核心问题。通过构建涵盖空间结构、相对位置与垂直感知的多维度任务,该数据集填补了导航代理空间推理能力量化评估的空白。其提出的评估框架揭示了现有模型在空间认知层面的局限性,为改进导航算法的几何理解与动态决策机制提供了关键理论支撑,显著提升了具身导航研究的科学性与可复现性。
衍生相关工作
基于NavSpace衍生的SNav模型开创了空间智能导航的新范式,其通过融合多模态感知与几何推理机制,在真实机器人测试中取得突破性性能。该数据集进一步激发了如空间指令生成、跨场景泛化研究等方向的发展,推动VLN-BERT、Env-Aware Transformer等模型在空间语义对齐领域的创新,为具身导航与空间计算研究的深度融合奠定了数据基石。
以上内容由遇见数据集搜集并总结生成


