UISCI Dataset
收藏github2025-06-23 更新2025-06-24 收录
下载链接:
https://github.com/Qpu523/UISCI-Dataset
下载链接
链接失效反馈官方服务:
资源简介:
UISCI数据集是一个大规模、高分辨率的城市交叉口车辆与行人近距交互数据集,通过CARLA模拟生成,包含超过80,000个近距交互事件,记录了真实的避碰行为。
The UISCI dataset is a large-scale, high-resolution dataset focusing on close-range interactions between vehicles and pedestrians at urban intersections. Generated via the CARLA simulator, it contains over 80,000 close-range interaction events and records realistic collision-avoidance behaviors.
创建时间:
2025-06-16
原始信息汇总
UISCI数据集概述
数据集简介
- 名称:UISCI Dataset (Urban Intersection Safety-Critical Interaction Dataset)
- 类型:车辆-行人近碰撞交互数据集
- 规模:80,000+近碰撞交互事件
- 生成方法:基于CARLA仿真环境的两阶段多智能体SST-DDPG框架生成
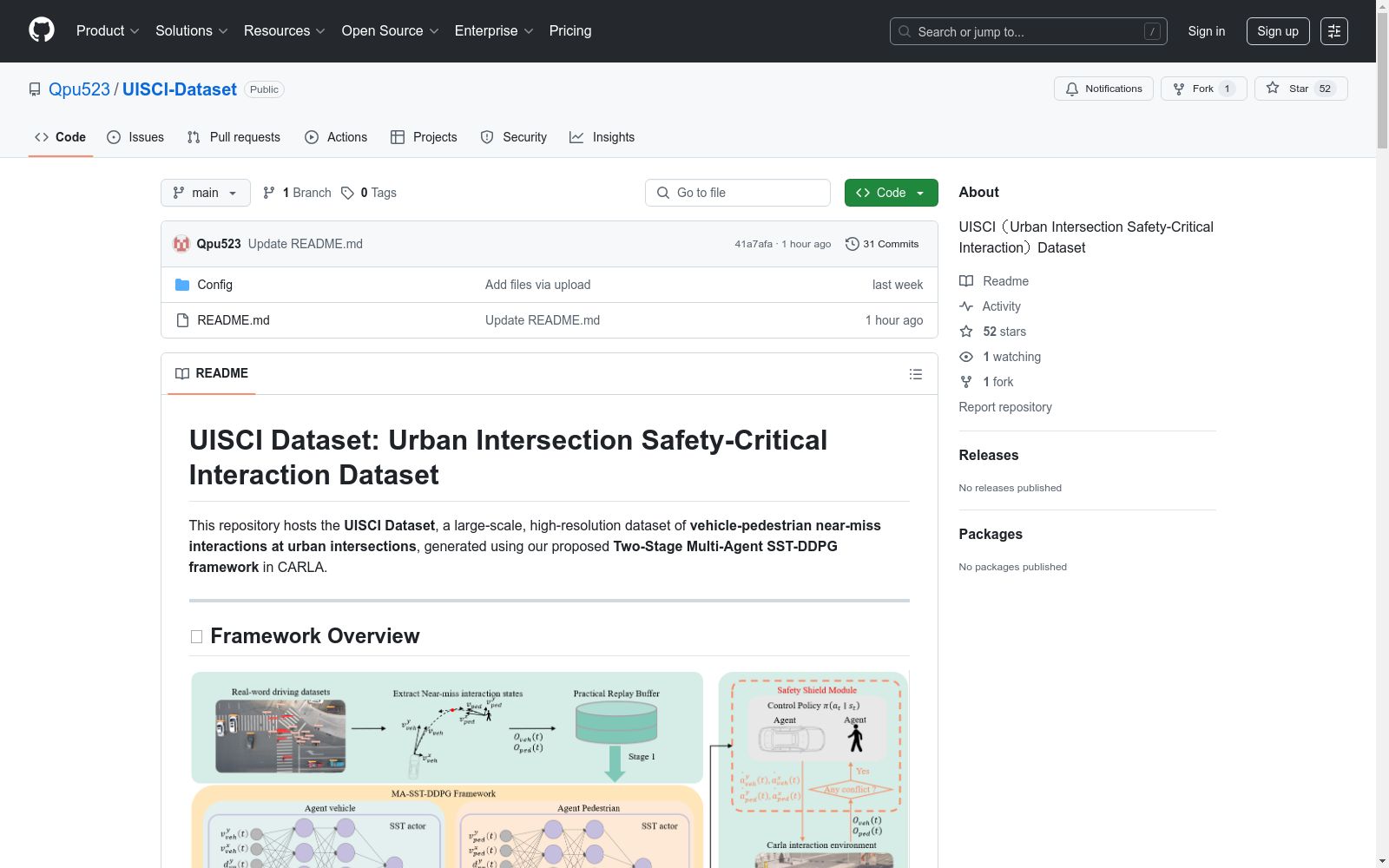
框架概述
- 两阶段生成框架:
- 风险场景生成:基于曲率时间碰撞(CurvTTC)触发器生成高风险交互场景
- 多智能体训练:使用安全强化学习模型进行预训练和在线学习
仿真环境
- 地点:CARLA Town10中的两个交叉口布局(A和B)
- 场景:8种车辆-行人交互场景(4种行人穿越方向×2个位置)
- 标注:
- 绿色箭头:行人穿越方向
- 红色箭头:车辆右转方向
数据内容
- 轨迹特征:
- 记录频率:20Hz
- 总轨迹长度:约2.6km(行人)+1.7km(车辆)
- 关键字段:
count:交互事件索引frame:帧编号veh_id/ped_id:参与者IDposition_x_av:车辆x坐标(m)velocity_y_ped:行人y速度(m/s)CurvTTC:曲率时间碰撞值(s)
数据集结构
- 文件组织:8个场景文件(如
LocationA_PedCross_S-N.csv) - 每个文件:包含>10,000个交互事件
真实性验证
- 图灵测试:
- 51名参与者评估
- 对比真实视频/CARLA基线/本框架生成视频
- 统计结果:
- 本框架生成视频与真实视频无显著差异(p=0.9282)
- 显著优于CARLA基线(p<0.0001)
获取方式
- 下载链接:包含8个子集(按行人穿越方向划分)
联系方式
- 联系人:
- kxie@odu.edu
- qpu001@odu.edu
搜集汇总
数据集介绍
构建方式
UISCI数据集通过两阶段多智能体安全强化学习框架构建,专注于模拟城市交叉路口车辆与行人之间的高风险互动场景。第一阶段利用曲率时间碰撞(CurvTTC)触发机制,在CARLA仿真环境中生成数千种交互情景,当CurvTTC低于风险阈值时记录为近失轨迹。第二阶段采用多智能体SST-DDPG算法进行预训练和在线学习,不断优化模型以适应动态行为,最终生成超过80,000条逼真的近失交互数据。
特点
该数据集以其高分辨率和多样性著称,涵盖两种城市交叉路口布局和八种行人过街场景,每条轨迹均以20Hz频率记录,包含车辆与行人的详细运动参数。其独特之处在于通过人类图灵测试验证了数据真实性,统计显示模型生成的交互与真实世界视频在视觉上无法区分,为研究自动驾驶安全策略提供了高度可信的基准。
使用方法
数据集按场景划分为八个子集,每个CSV文件包含逾万次交互事件,涵盖位置、速度及CurvTTC等关键字段。研究者可通过分析不同方向的冲突模式,训练或验证自动驾驶决策模型。数据下载后可直接导入Python或MATLAB进行轨迹可视化,或结合强化学习框架复现论文中的安全策略训练流程。
背景与挑战
背景概述
UISCI数据集是由Qpu523团队基于CARLA仿真平台构建的大规模城市交叉口车辆-行人近距交互数据集,专注于捕捉真实碰撞规避行为。该数据集采用创新的两阶段多智能体SST-DDPG框架生成,通过曲率时间碰撞(CurvTTC)指标触发风险场景记录,包含超过80,000个交互事件。研究团队通过严谨的图灵测试验证了数据真实性,证明其与真实世界行为在统计学上无显著差异。作为智能交通系统安全研究的重要基准,该数据集为自动驾驶决策算法开发提供了高质量的冲突场景数据支撑。
当前挑战
在解决领域问题方面,UISCI数据集面临着准确建模复杂人车交互动态的挑战,特别是在高密度城市环境中存在多种不可预测的避碰行为模式。传统线性运动模型难以刻画行人突然变向等非线性特征,而真实数据采集又涉及重大安全隐患。构建过程中,研究团队需要克服仿真环境与真实场景的语义鸿沟,包括物理引擎精度限制、传感器噪声模拟不足等问题。多智能体强化学习框架的稳定性控制,以及在线学习阶段的行为多样性保持,都是确保数据真实性和覆盖度的关键技术难点。
常用场景
经典使用场景
在智能交通系统与自动驾驶研究中,UISCI数据集为车辆与行人交互行为分析提供了丰富的仿真数据。其经典使用场景包括模拟城市交叉路口右转车辆与横穿行人的近碰撞事件,通过高精度轨迹数据揭示冲突模式与避让策略。数据集特别适用于分析不同方向行人流与车辆转弯行为的时空耦合关系,为理解复杂交通场景中的风险决策机制奠定基础。
实际应用
在实际工程层面,数据集支撑了智能交叉路口预警系统的开发,通过历史近碰撞模式识别潜在高风险区域。交通管理部门可基于场景分类结果优化信号灯时序,汽车制造商利用避碰轨迹改进AEB算法。特别值得注意的是,数据集揭示的8类典型冲突构型,已直接应用于多个城市智慧交通改造项目的安全评估模块。
衍生相关工作
基于该数据集的衍生研究形成三大方向:在理论层面催生了基于CurvTTC的风险评估统一框架,在算法领域推动了多模态强化学习在冲突消解中的应用,在系统集成方面衍生出多个开源仿真平台插件。其中最具代表性的是将两阶段训练范式扩展至V2X场景的HiRISC框架,以及基于轨迹聚类开发的交叉路口风险热力图生成工具链。
以上内容由遇见数据集搜集并总结生成


