UT Multi-modal (UT-MM)
收藏arXiv2025-09-30 收录
下载链接:
https://vita-group.github.io/MM3DGS-SLAM
下载链接
链接失效反馈官方服务:
资源简介:
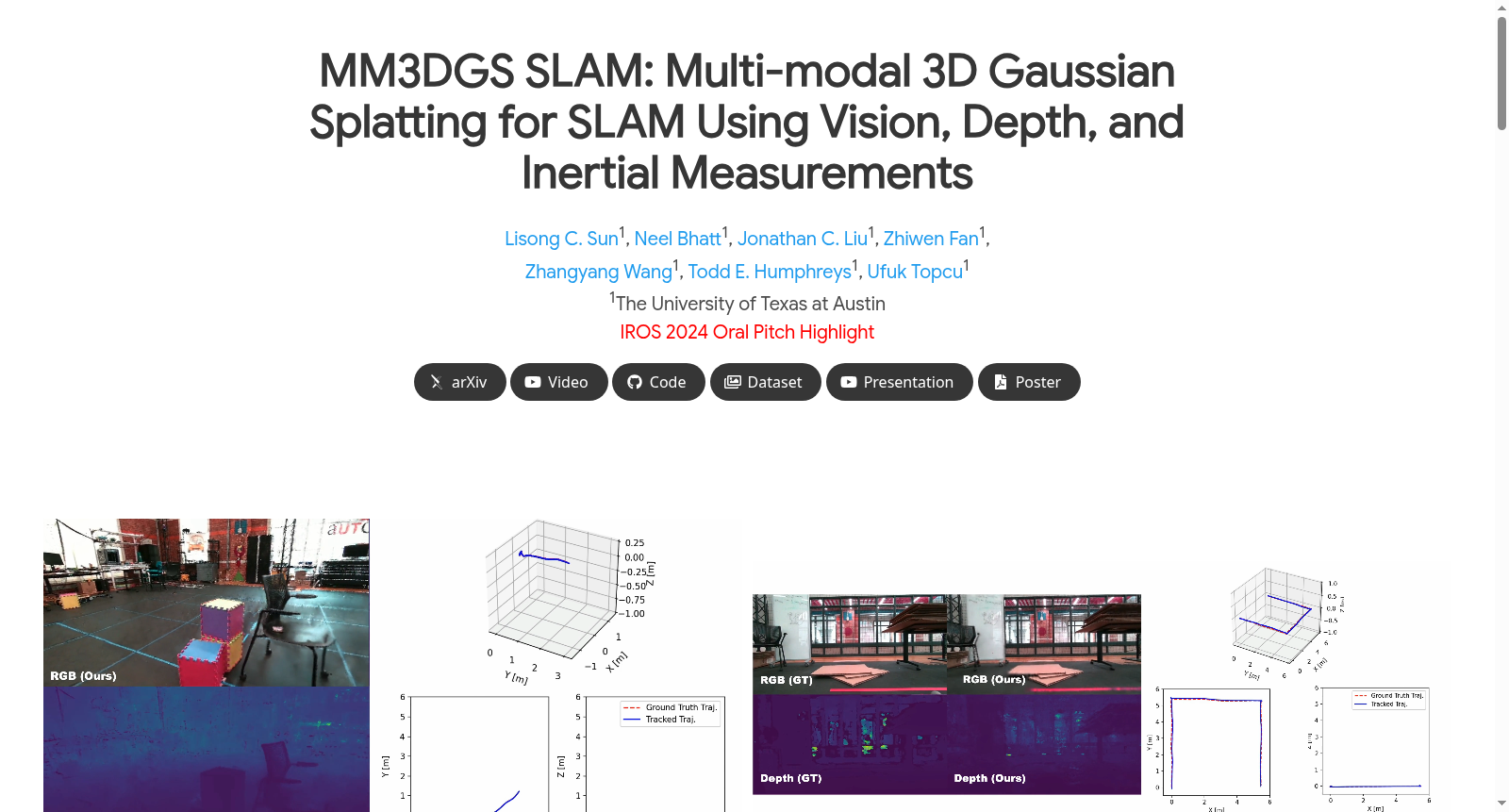
该数据集名为UT-MM,是由一台配备了相机和惯性测量单元的移动机器人收集的多模态数据集,包含了RGB图像、深度图像、惯性测量数据以及点云信息。该数据集涵盖了包含动态物体的场景,并通过硬件板进行同步,以确保数据收集的准确性。该数据集规模较大,包含了八个不同标注的场景,其任务是对同时定位与地图构建(SLAM)进行研究和应用。
The dataset named UT-MM is a multimodal dataset collected by a mobile robot equipped with a camera and an inertial measurement unit (IMU). It encompasses RGB images, depth images, inertial measurement data, and point cloud information. This dataset covers scenarios containing dynamic objects, and all collected data is synchronized via a hardware board to guarantee the accuracy of data acquisition. With a large scale, UT-MM includes eight distinctly annotated scenarios, and it is dedicated to the research and application of simultaneous localization and mapping (SLAM).
提供机构:
University of Texas at Austin
搜集汇总
数据集介绍
背景与挑战
背景概述
UT-MM是一个多模态数据集,由配备摄像头和惯性测量单元(IMU)的移动机器人采集,包含视觉、深度和惯性测量数据。该数据集专为SLAM(同时定位与地图构建)研究设计,支持3D高斯溅射等先进方法,用于实现实时跟踪和高分辨率3D地图重建。
以上内容由遇见数据集搜集并总结生成


