GigaHands
收藏arXiv2024-12-05 更新2024-12-07 收录
下载链接:
https://ivl.cs.brown.edu/research/gigahands.html
下载链接
链接失效反馈官方服务:
资源简介:
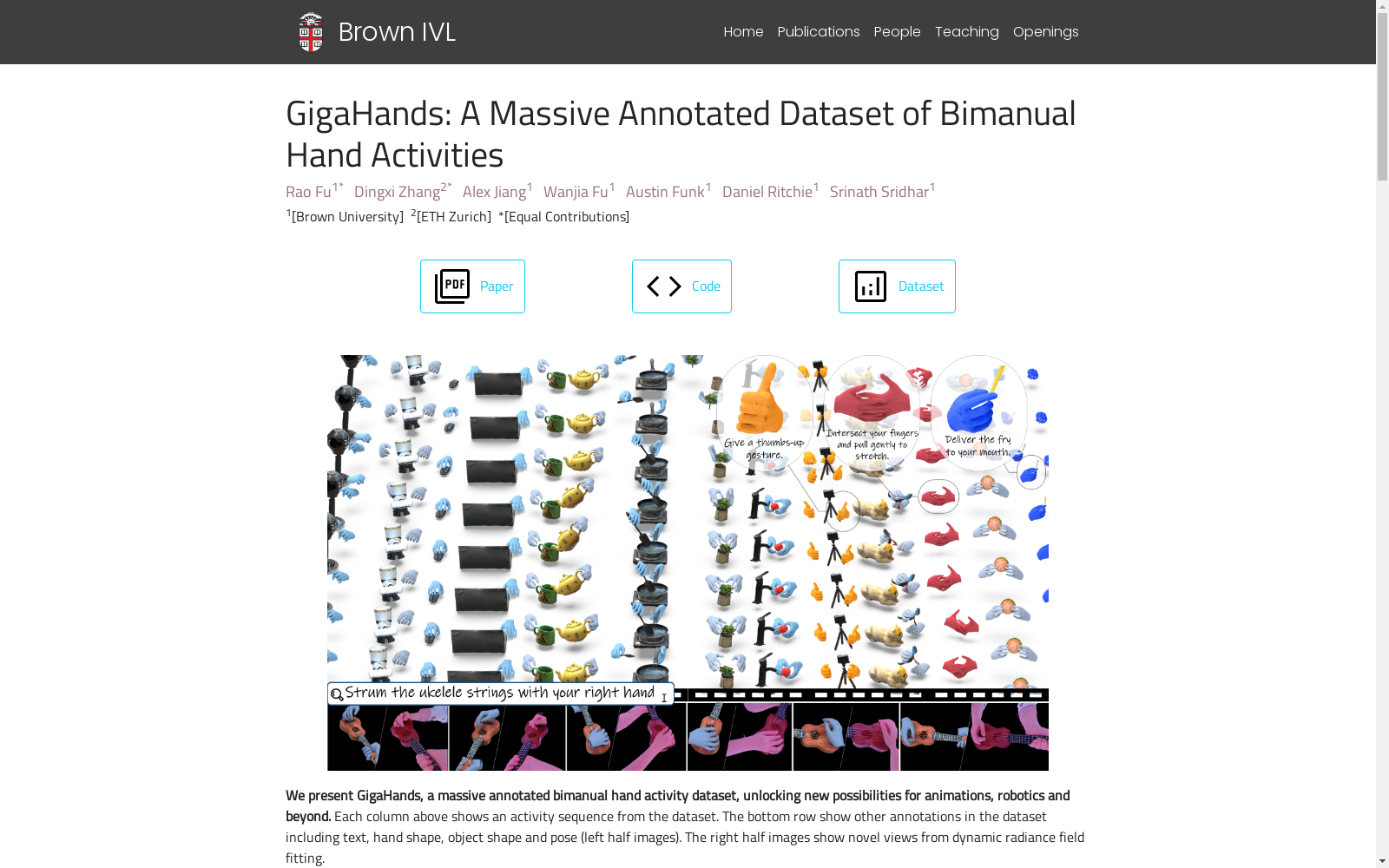
GigaHands是由布朗大学和苏黎世联邦理工学院联合创建的一个大规模双手机械手活动数据集。该数据集包含34小时的56名受试者与417个物体的互动视频,总计18300万帧,配有84,000条详细的文本描述。数据集内容丰富,涵盖了多种手部活动,包括手-物互动、手势和自我互动。创建过程中采用了无标记的多摄像头捕捉系统,确保了3D手部和物体姿态的自动估计,同时通过指导性标注策略减少了手动标注的工作量。GigaHands数据集的应用领域广泛,包括文本驱动的动作合成、手部运动描述和动态辐射场重建,旨在解决人工智能和机器人领域中对手部活动理解的关键问题。
GigaHands is a large-scale bimanual robotic hand activity dataset jointly created by Brown University and ETH Zurich. This dataset contains 34 hours of interaction videos between 56 subjects and 417 objects, totaling 183 million frames, and is accompanied by 84,000 detailed text descriptions. The dataset covers a rich variety of hand activities, including hand-object interaction, gestures, and self-interaction. During its creation, a markerless multi-camera capture system was adopted to enable automatic estimation of 3D hand and object poses, while a guided annotation strategy was used to reduce the workload of manual annotation. GigaHands has a wide range of application scenarios, including text-driven action synthesis, hand motion description, and dynamic radiance field reconstruction, aiming to address key issues in hand activity understanding in the fields of artificial intelligence and robotics.
提供机构:
布朗大学
创建时间:
2024-12-05
搜集汇总
数据集介绍
构建方式
GigaHands is meticulously constructed through a multi-camera markerless capture system, which records 34 hours of bimanual hand activities from 56 subjects interacting with 417 real-world objects. This setup captures 183 million frames, each paired with detailed text annotations. The dataset is enriched with annotations including 3D hand shape and pose, MANO hand meshes, 3D object shape, pose, and appearance, hand/object segmentation masks, 2D/3D hand keypoints, and camera pose. The data acquisition protocol employs an instruct-to-annotate strategy, guiding subjects with detailed instructions to minimize post-capture annotation effort.
特点
GigaHands stands out for its massive scale and diversity, encompassing a wide range of hand activities such as hand-object interactions, gestures, and self-contacts. The dataset's richness is further enhanced by its detailed annotations, which include text descriptions, 3D hand and object models, and segmentation masks. The use of 51 camera views enables dynamic radiance field reconstruction, opening new avenues for research in 3D hand motion analysis and synthesis.
使用方法
Researchers can leverage GigaHands for a variety of applications, including text-driven action synthesis, hand motion captioning, and dynamic 3D reconstruction. The dataset's detailed annotations and multi-view setup facilitate the training of models for tasks such as generating realistic hand motions from textual descriptions, captioning hand movements, and reconstructing 3D scenes with high fidelity. The comprehensive nature of GigaHands allows for broad applicability across AI and robotics domains, particularly in understanding and replicating human hand activities.
背景与挑战
背景概述
GigaHands, introduced in 2024, is a pioneering dataset meticulously curated to address the critical problem of understanding bimanual human hand activities in AI and robotics. Developed by a collaborative team from Brown University and ETH Zurich, GigaHands captures 34 hours of intricate bimanual hand activities from 56 subjects interacting with 417 objects. This dataset, comprising 14,000 motion clips derived from 183 million frames, is paired with 84,000 text annotations, making it the largest of its kind. The dataset's creation involved a markerless multi-camera capture system, enabling fully automated 3D hand and object estimation while minimizing manual annotation effort. GigaHands' scale and diversity significantly enhance applications such as text-driven action synthesis, hand motion captioning, and dynamic radiance field reconstruction, marking a substantial advancement in the field.
当前挑战
The development of GigaHands faced several challenges, primarily in sourcing large-scale 3D hand activities data. Traditional methods, such as capturing hand manipulations in uncontrolled environments or controlled studio settings, each have limitations. In-the-wild data is sparse, hard to calibrate, and noisy, leading to limited 3D motion reconstruction accuracy, especially for objects. Studio settings, while offering more controlled conditions, limit data diversity and can inhibit natural interactions due to staged setups and marker-based tracking. GigaHands addresses these challenges by employing a multi-camera markerless capture system, designed to replicate in-the-wild settings during activity elicitation and estimate accurate 3D motion. Despite these advancements, the studio setting confines data collection to a limited space, making it challenging to capture motions that require larger environments. Additionally, fully automatic tracking of articulated and non-rigid objects remains an ongoing challenge, necessitating future research in markerless tracking techniques and flexible representations.
常用场景
经典使用场景
GigaHands数据集的经典使用场景主要集中在双人手部活动的理解和分析上。该数据集通过捕捉56名受试者与417个真实世界物体互动的34小时视频,提供了丰富的双人手部活动数据。这些数据可以用于训练和验证模型,以实现对手部动作的精确识别和理解,特别是在手-物体交互、手势识别和自我交互等复杂场景中。
解决学术问题
GigaHands数据集解决了在人工智能和机器人领域中理解双人手部活动的关键问题。由于现有数据集在规模、多样性和详细注释方面的不足,构建大规模的双人手部活动模型一直是一个挑战。GigaHands通过提供大规模、多样化和详细注释的数据,为研究人员提供了一个强大的工具,以推动手部活动理解、手势识别和动态场景重建等领域的研究。
衍生相关工作
GigaHands数据集的发布催生了一系列相关研究工作,特别是在手部动作合成、手部动作描述和动态场景重建等领域。例如,基于GigaHands数据集的研究已经实现了文本驱动的动作合成、手部动作描述生成和动态辐射场重建等应用。这些研究不仅展示了GigaHands数据集的广泛适用性,还为未来的研究提供了新的方向和灵感。
以上内容由遇见数据集搜集并总结生成


