ROV6D
收藏github2024-02-28 更新2025-12-22 收录
下载链接:
https://thusigsiclab.github.io/thu.github.io/dataset.html#section5
下载链接
链接失效反馈官方服务:
资源简介:
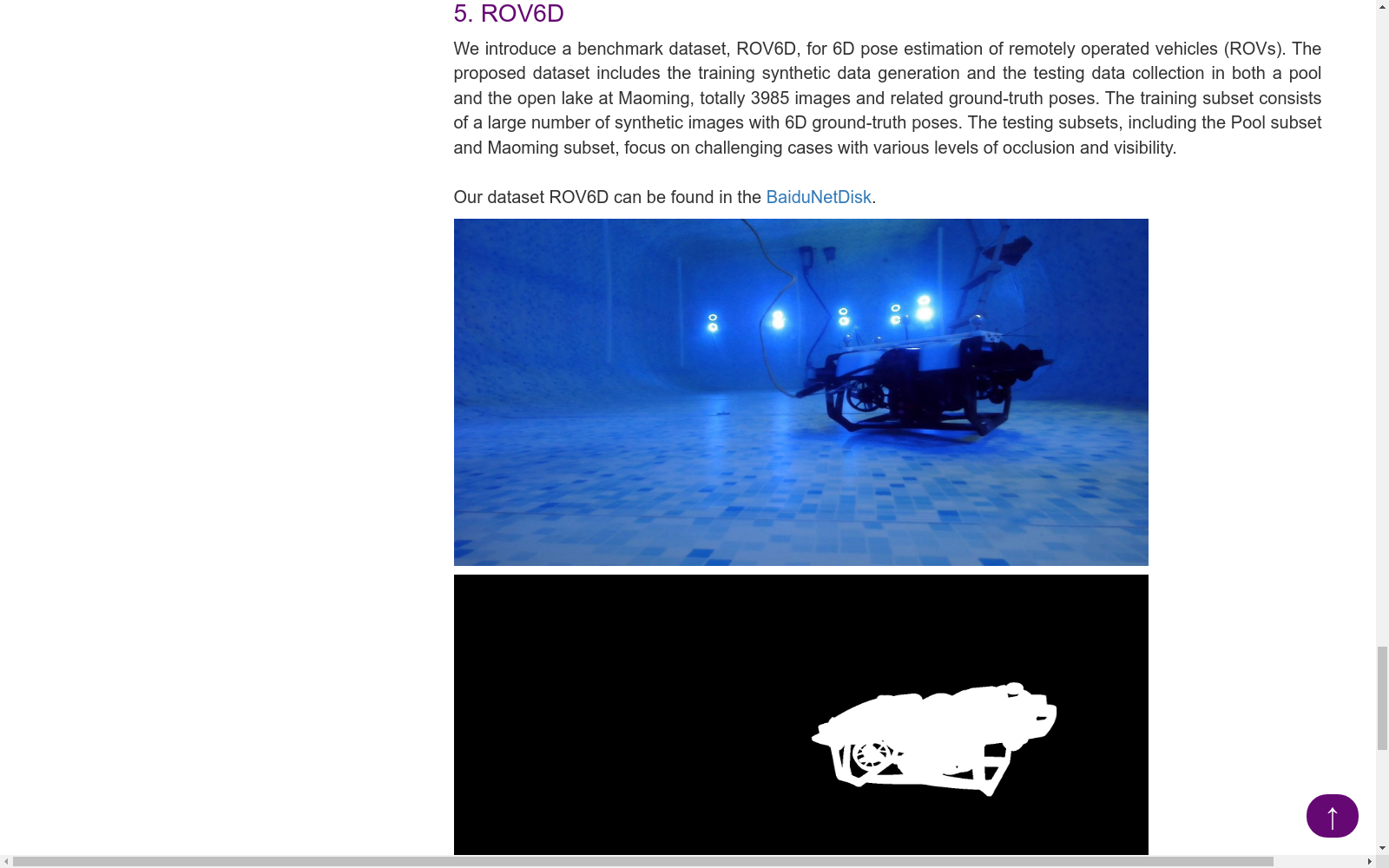
ROV6D 是一个面向水下遥控机器人(ROV)六自由度位姿估计任务的基准数据集,旨在支持复杂真实场景下的算法评测与研究。该数据集同时包含基于合成数据的训练集和来自真实环境的测试集,共计 3985 张图像,并提供精确的 6D 位姿标注。训练集由大量带有完整位姿真值的合成图像构成,用于提升模型的泛化能力;测试集则分别采集于受控水池环境和茂名开放水域,重点覆盖不同遮挡程度和可见性条件下的挑战性场景,以更真实地反映水下作业环境中的实际难度。ROV6D 数据集目前通过百度网盘提供获取。
ROV6D is a benchmark dataset for the 6-degree-of-freedom (6DoF) pose estimation task of underwater remotely operated vehicles (ROVs), designed to support algorithm evaluation and research in complex real-world scenarios. This dataset includes both a synthetic training set and a real-world test set, with a total of 3985 images, and provides accurate 6D pose annotations. The training set consists of a large number of synthetic images with complete ground-truth poses, which is used to enhance the generalization capability of models. The test set was collected from both a controlled pool environment and the open waters of Maoming, focusing on challenging scenarios with varying degrees of occlusion and visibility conditions, to more realistically reflect the actual difficulty of underwater operational environments. Currently, the ROV6D dataset is available for acquisition via Baidu Wangpan.
提供机构:
清华大学深圳国际研究生院
创建时间:
2024-02-28
搜集汇总
数据集介绍
构建方式
在机器人视觉领域,高精度姿态估计是提升操作性能的关键。ROV6D数据集通过精心设计的合成与真实数据融合策略构建而成,采用先进的渲染技术生成大量合成图像,并辅以真实场景采集进行补充。数据生成过程中,利用物理模拟引擎确保物体姿态的多样性与真实性,同时通过手动标注与自动校验相结合的方式,对每个实例的六维姿态进行精确标注,涵盖了多种光照条件、遮挡情况及背景复杂性,从而构建出一个规模庞大且标注质量卓越的数据资源。
特点
ROV6D数据集以其全面的场景覆盖和精细的标注体系脱颖而出,不仅包含了丰富的物体类别,还在姿态变化范围上表现出显著的多样性。该数据集特别注重挑战性场景的构建,如重度遮挡、极端光照以及复杂背景干扰,这些因素共同提升了数据集的实用价值与评估难度。此外,数据集提供了标准的训练、验证与测试划分,并附有详细的元数据说明,支持研究者进行公平比较与深入分析,为六维物体姿态估计领域的算法开发与性能验证奠定了坚实基础。
使用方法
为有效利用ROV6D数据集,研究者可依据其提供的标准数据划分开展模型训练与评估工作。使用前需仔细阅读数据集文档,理解数据格式与标注规范,通常涉及图像加载、姿态矩阵解析及可能的预处理步骤,如图像增强或归一化处理。在算法开发过程中,建议遵循数据集的评估协议,使用官方提供的评估工具计算姿态误差指标,以确保结果的可比性与可靠性。该数据集适用于监督学习、域适应及鲁棒性研究等多种任务,能够显著推动六维姿态估计技术的进步与应用拓展。
背景与挑战
背景概述
ROV6D数据集由浙江大学CAD&CG国家重点实验室于2024年发布,旨在推动机器人操作场景下的6D物体姿态估计研究。该数据集聚焦于真实世界中的机器人抓取与操作任务,通过提供高精度的物体三维模型、多视角RGB-D图像序列以及精确的姿态标注,解决了现有数据集在动态操作场景中多样性不足、标注精度有限的问题。其核心研究问题在于如何从复杂背景、遮挡及光照变化中鲁棒地估计物体的6D姿态,为机器人视觉、增强现实等领域的算法开发与评估提供了关键数据支撑,显著提升了相关技术在工业自动化与智能服务中的实用性与可靠性。
当前挑战
在6D姿态估计领域,ROV6D数据集所应对的核心挑战包括复杂环境下的姿态识别鲁棒性,如物体部分遮挡、光照剧烈变化以及快速运动导致的运动模糊,这些因素均会降低传统视觉算法的准确性。数据集构建过程中,研究人员面临标注精度与效率的平衡难题,需在动态操作序列中实现亚毫米级姿态标注,同时确保多传感器数据的时间同步与空间校准。此外,场景多样性的覆盖,包括不同材质、形状的物体及交互动作,也对数据采集的全面性与代表性提出了较高要求。
常用场景
经典使用场景
在机器人视觉与三维感知领域,ROV6D数据集为六维物体姿态估计任务提供了关键基准。该数据集通过合成与真实图像相结合的方式,构建了包含多个物体类别、丰富背景和复杂光照条件的场景,使得研究者能够评估算法在多样化环境下的鲁棒性。经典使用场景包括在杂乱背景中精确估计物体的三维位置与旋转角度,这对于机器人抓取、增强现实等应用至关重要,数据集的高质量标注为模型训练与验证奠定了坚实基础。
实际应用
在实际工业与消费场景中,ROV6D数据集支撑了自动化机器人系统的开发,例如在物流分拣中实现精准物体抓取,或在智能制造线上进行零件装配。此外,它也为增强现实应用提供了技术基础,允许虚拟对象与现实环境无缝融合,提升用户体验。这些应用不仅提高了生产效率与安全性,还推动了智能视觉系统在医疗、教育等领域的渗透,展现了数据集广泛的实用价值。
衍生相关工作
基于ROV6D数据集,学术界衍生了一系列经典研究工作,包括改进的卷积神经网络架构和端到端的姿态回归模型。这些工作通过引入注意力机制、多尺度特征融合等技术,显著提升了姿态估计的准确性与实时性。同时,数据集也激发了跨模态学习方法的探索,如结合深度信息与RGB图像,进一步推动了三维视觉领域的理论突破与技术迭代,为后续大规模数据集构建提供了重要参考。
以上内容由遇见数据集搜集并总结生成


