CMU Stretch
收藏github2025-03-21 收录
下载链接:
https://robo-affordances.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
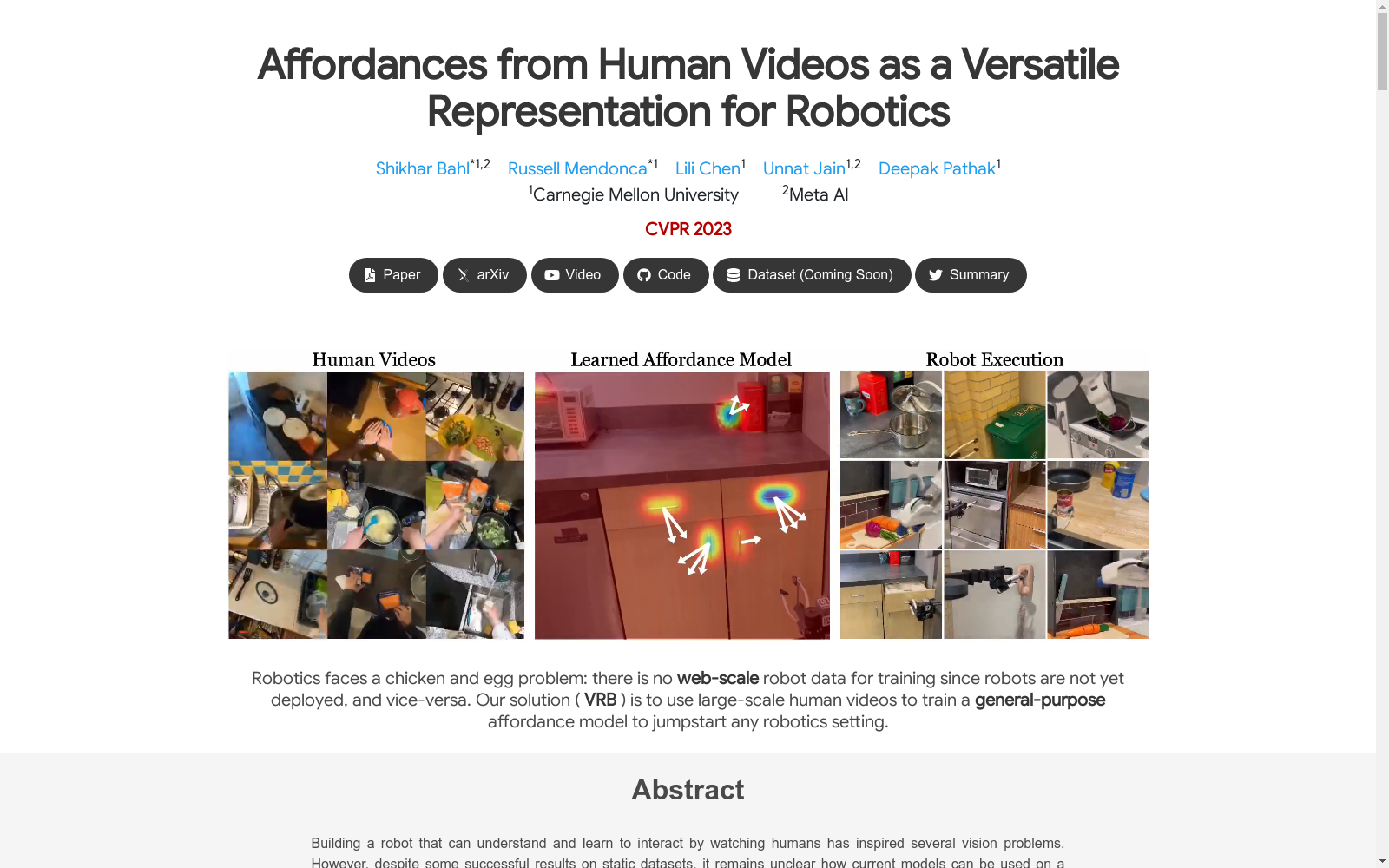
CMU Stretch 数据集由卡内基梅隆大学(CMU)的研究团队创建,专注于机器人在真实环境中的操作任务,如开门、拉抽屉等。该数据集包含在模拟环境和真实世界中采集的数据,旨在促进机器人对可折叠物体的操作与控制研究。数据集包含 54K 图像-轨迹-接触点元组,每个元组记录了机器人在执行任务时的图像、轨迹和接触点信息。数据来源于 EpicKitchens-100 视频数据集,涉及多种厨房任务和操作。
The CMU Stretch Dataset was developed by a research team at Carnegie Mellon University (CMU), focusing on real-world robotic manipulation tasks such as opening doors and pulling drawers. The dataset includes data collected from both simulated environments and real-world scenarios, aiming to advance research on robotic manipulation and control of foldable objects. It contains 54K image-trajectory-contact point tuples, with each tuple recording the robot's captured images, movement trajectory, and contact point information during task execution. The data is sourced from the EpicKitchens-100 video dataset, covering a wide range of kitchen-related tasks and manipulation operations.
提供机构:
卡内基梅隆大学
搜集汇总
数据集介绍
构建方式
CMU Stretch数据集的构建基于卡内基梅隆大学的研究团队在机器人操作领域的深入探索。该数据集通过高精度的传感器和先进的机器人平台,捕捉了机器人在执行复杂任务时的运动轨迹和操作数据。研究人员设计了多种实验场景,涵盖了从简单抓取到复杂装配的任务,确保数据的多样性和代表性。数据的采集过程严格遵循科学实验的标准,确保了数据的准确性和可重复性。
特点
CMU Stretch数据集的特点在于其丰富的任务类型和高精度的数据记录。数据集不仅包含了机器人在不同任务中的运动轨迹,还记录了环境中的物体位置、姿态以及机器人与物体的交互信息。这些数据为研究机器人操作中的运动规划、控制策略以及任务学习提供了宝贵的资源。此外,数据集还提供了详细的元数据,便于研究人员进行深入分析和模型训练。
使用方法
CMU Stretch数据集的使用方法主要围绕机器人操作的研究展开。研究人员可以通过加载数据集中的任务数据,分析机器人在不同任务中的表现,并基于此开发新的控制算法或优化现有模型。数据集还支持多种编程语言和工具,便于用户进行数据处理和可视化。通过结合数据集提供的元数据,用户可以进一步探索机器人操作中的关键问题,如任务分解、路径规划以及多机器人协作等。
背景与挑战
背景概述
CMU Stretch数据集由卡内基梅隆大学的研究团队于2010年创建,旨在解决机器人运动规划与控制中的复杂问题。该数据集的核心研究问题聚焦于如何在动态环境中实现高效且安全的机器人运动规划,尤其是在面对非结构化环境时。通过提供丰富的传感器数据和运动轨迹记录,CMU Stretch为机器人学领域的研究者提供了一个重要的实验平台,推动了机器人自主导航和操作能力的发展,对相关领域的研究产生了深远影响。
当前挑战
CMU Stretch数据集在解决机器人运动规划问题时面临多重挑战。首先,动态环境中的不确定性使得运动规划的实时性和鲁棒性难以兼顾,尤其是在面对复杂障碍物时。其次,数据集的构建过程中,研究人员需要克服传感器数据同步与校准的技术难题,以确保数据的准确性和一致性。此外,如何在非结构化环境中捕捉多样化的运动模式,并生成具有代表性的数据集,也是构建过程中面临的主要挑战。这些挑战不仅反映了机器人运动规划领域的复杂性,也为未来的研究提供了重要的方向。
常用场景
经典使用场景
CMU Stretch数据集在机器人学和人工智能领域中被广泛用于研究机器人的灵活性和适应性。该数据集通过记录机器人在不同环境下的运动数据和交互行为,为研究者提供了丰富的实验材料,特别是在机器人路径规划和动态环境适应方面的研究。
衍生相关工作
基于CMU Stretch数据集,研究者已经开发了多种先进的机器人控制算法和模型。这些工作不仅推动了机器人技术的发展,也为相关领域如计算机视觉和机器学习提供了新的研究视角和方法。
数据集最近研究
最新研究方向
在机器人学与人工智能领域,CMU Stretch数据集作为一项重要的资源,近年来在机器人自主导航与环境交互研究中扮演了关键角色。该数据集聚焦于机器人拉伸动作的精确控制与动态环境适应能力,为研究者提供了丰富的实验数据与场景模拟。随着柔性机器人技术的快速发展,CMU Stretch数据集在软体机器人、人机协作以及复杂环境下的任务规划等前沿方向展现出巨大潜力。特别是在医疗辅助机器人领域,该数据集的应用推动了手术机器人精细化操作与康复机器人个性化服务的创新。其多模态数据融合与高精度动作捕捉技术,为机器人智能化发展提供了重要支撑,成为当前研究热点之一。
以上内容由遇见数据集搜集并总结生成


