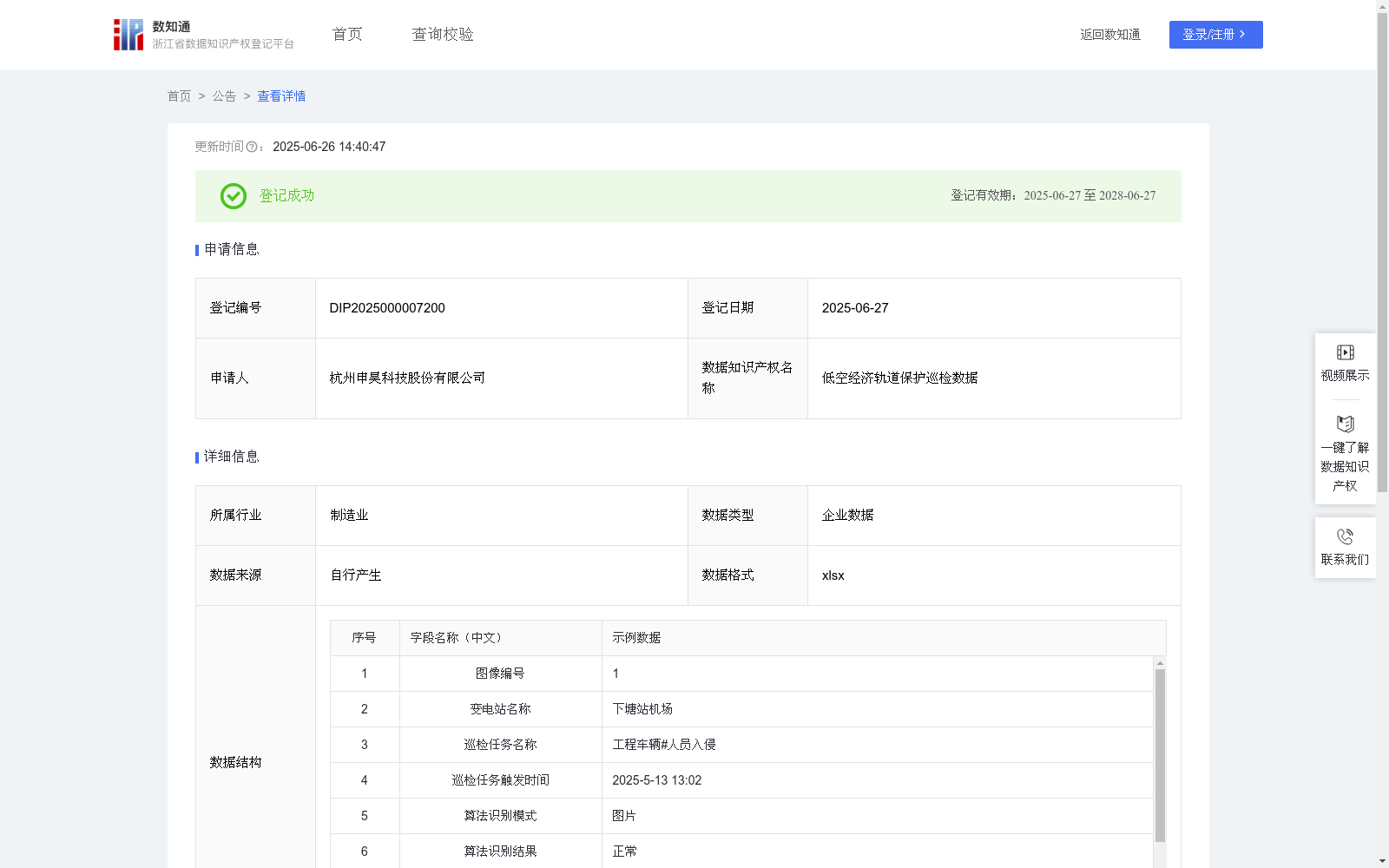
低空经济轨道保护巡检数据
收藏浙江省数据知识产权登记平台2025-06-26 更新2025-06-27 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/142187
下载链接
链接失效反馈官方服务:
资源简介:
低空经济轨道保护巡检功能旨在消除检测盲区,主要应用于:通过无人机结合AI算法针对轨道沿线的工程车辆、施工人员安全帽、烟火识别以及轨道人员入侵检测等等业务场景,判断工程车辆是否正常、人员是否佩戴安全帽、是否发生烟火及是否发生人员入侵等状态,实现轨道区域内的状态预警与报警,减少人工巡检的风险并降低运营维护成本。通过无人机按照指定航线飞行,实时将无人机画面传到算法端,算法针对实时画面进行分析,实现轨道周边安全的巡检任务。
(1)数据采集:无人机飞行过程中回传的实时画面图像;
(2)数据处理:通过ffmpeg获取无人机实时rtmp流信息,并逐帧传入算法模块;图片帧通过YOLO目标检测技术,检出该帧内的工程车辆、人、以及异物,再将图片输入YOLO分割模型,将轨道分割出来,并通过已知轨道宽度,等比例计算工程车辆、人到轨道的距离,设定算法报警阈值,在阈值范围内的目标判定为异常,根据不同物体的距离划分异常等级。
(3)将无人机飞行过程中被判定为异常的帧通过minio服务器传给平台,当图像识别结果为渣土车#塔吊#人员入侵,时进行预警,1为预警。算法识别结果为正常时不预警,0为不预警,便于现场人员快速判别设备的状态是否异常;
(4)同时可根据识别出的数据按天、月、年等时间维度进行趋势分析,形成安全报表数据。
The Low-altitude Economy Track Protection Inspection Function aims to eliminate detection blind spots, and is primarily applied to scenarios where UAVs combined with AI algorithms perform tasks including detecting engineering vehicles along railways, construction workers' safety helmet wearing, fire and smoke, and unauthorized personnel intrusion on tracks. It judges whether engineering vehicles operate normally, whether personnel wear safety helmets, whether fire or smoke incidents occur, and whether unauthorized personnel intrude, enabling state early warning and alarm within track areas, reducing risks of manual inspection and lowering operation and maintenance costs. UAVs fly along pre-defined routes, transmit real-time footage to the algorithm terminal, and the algorithm analyzes the real-time footage to complete safety inspection tasks around the track.
(1) Data Collection: Real-time frame images transmitted back during UAV flight;
(2) Data Processing: Retrieve real-time RTMP streams from UAVs via FFmpeg, and feed each frame into the algorithm module. First, detect engineering vehicles, humans and foreign objects in each frame using YOLO object detection technology, then input the frames into the YOLO segmentation model to delineate the track area. Calculate the distances from engineering vehicles and humans to the track proportionally based on the known track width, set the algorithm's alarm threshold, classify targets within the threshold as anomalies, and grade the anomalies based on the distance of each object.
(3) Transmit the frames flagged as anomalies during UAV flight to the platform via the MinIO server. Trigger an early warning when the recognition results include muck trucks, tower cranes or unauthorized personnel intrusion, marked as 1 for early warning; No early warning is triggered when the algorithm identifies a normal status, marked as 0 for no warning, allowing on-site personnel to quickly determine whether the equipment status is abnormal;
(4) Additionally, trend analysis can be performed on the recognized data across time granularities such as daily, monthly and annual basis, generating safety report datasets.
提供机构:
杭州申昊科技股份有限公司
创建时间:
2025-06-10
搜集汇总
数据集介绍
背景与挑战
背景概述
该数据集由杭州申昊科技股份有限公司提供,包含501条每日更新的企业数据,主要用于低空经济轨道保护巡检。通过无人机结合AI算法,实现轨道沿线工程车辆、人员入侵等状态的检测与预警,减少人工巡检风险并降低运营成本。数据格式为xlsx,已存证于浙江省知识产权区块链公共存证平台。
以上内容由遇见数据集搜集并总结生成


