UniV
收藏UniV数据集概述
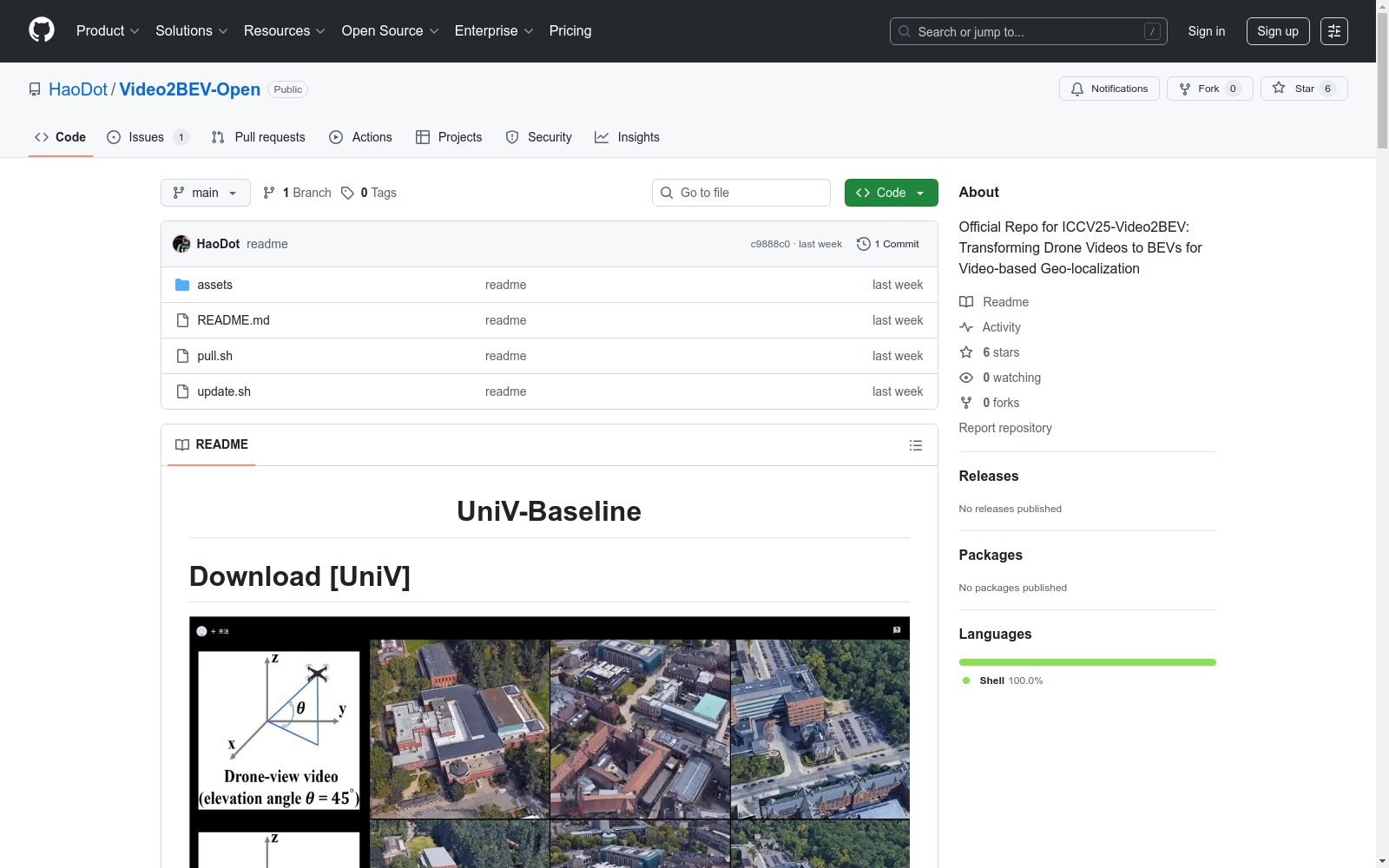
数据集简介
- 任务目标:
- 基于视频的无人机视角目标定位(无人机->卫星):通过无人机视频定位目标建筑在卫星视图中的位置。
- 基于视频的无人机导航(卫星->无人机):通过卫星图像定位无人机曾经过的相关位置。
数据集构成
-
数据划分:
子集 数据量 建筑数量 大学数量 训练集 701视频 + 12364图像 701 33 Query_drone 701视频 701 39 Query_satellite 701图像 701 39 Query_ground 2579图像 701 39 Gallery_drone 951视频 951 39 Gallery_satellite 951图像 951 39 Gallery_ground 2921图像 793 39 -
文件结构: bash . ├── 30 │ ├── 10fps │ │ ├── test │ │ │ └── gallery_drone │ │ └── train │ │ └── drone │ ├── 2fps │ │ ├── test │ │ │ └── gallery_drone │ │ └── train │ │ └── drone │ └── 5fps │ ├── test │ │ └── gallery_drone │ └── train │ └── drone ├── 45 │ ├── 10fps │ │ ├── test │ │ │ └── gallery_drone │ │ └── train │ │ └── drone │ ├── 2fps │ │ ├── test │ │ │ ├── gallery_drone │ │ │ ├── gallery_satellite │ │ │ └── gallery_street │ │ └── train │ │ ├── drone │ │ ├── google │ │ ├── satellite │ │ └── street │ └── 5fps │ ├── test │ │ └── gallery_drone │ └── train │ └── drone ├── dataset_split.json └── organize_univ.py
下载与准备
- 下载地址:BaiduCloud
- 解压命令:
cat UniV.tar.xz.* | tar -xvJf - --transform s|.*/|UniV/|
相关论文
bibtex @article{ju2024video2bev, title={Video2bev: Transforming drone videos to bevs for video-based geo-localization}, author={Ju, Hao and Huang, Shaofei and Liu, Si and Zheng, Zhedong}, journal={arXiv preprint arXiv:2411.13610}, year={2024} } @article{zheng2020university, title={University-1652: A Multi-view Multi-source Benchmark for Drone-based Geo-localization}, author={Zheng, Zhedong and Wei, Yunchao and Yang, Yi}, journal={ACM Multimedia}, year={2020} } @article{zheng2017dual, title={Dual-Path Convolutional Image-Text Embeddings with Instance Loss}, author={Zheng, Zhedong and Zheng, Liang and Garrett, Michael and Yang, Yi and Xu, Mingliang and Shen, Yi-Dong}, journal={ACM Transactions on Multimedia Computing, Communications, and Applications (TOMM)}, doi={10.1145/3383184}, volume={16}, number={2}, pages={1--23}, year={2020}, publisher={ACM New York, NY, USA} }