MS-Dataset
收藏github2024-06-24 更新2024-06-25 收录
下载链接:
https://github.com/JokerJohn/MS-Dataset
下载链接
链接失效反馈官方服务:
资源简介:
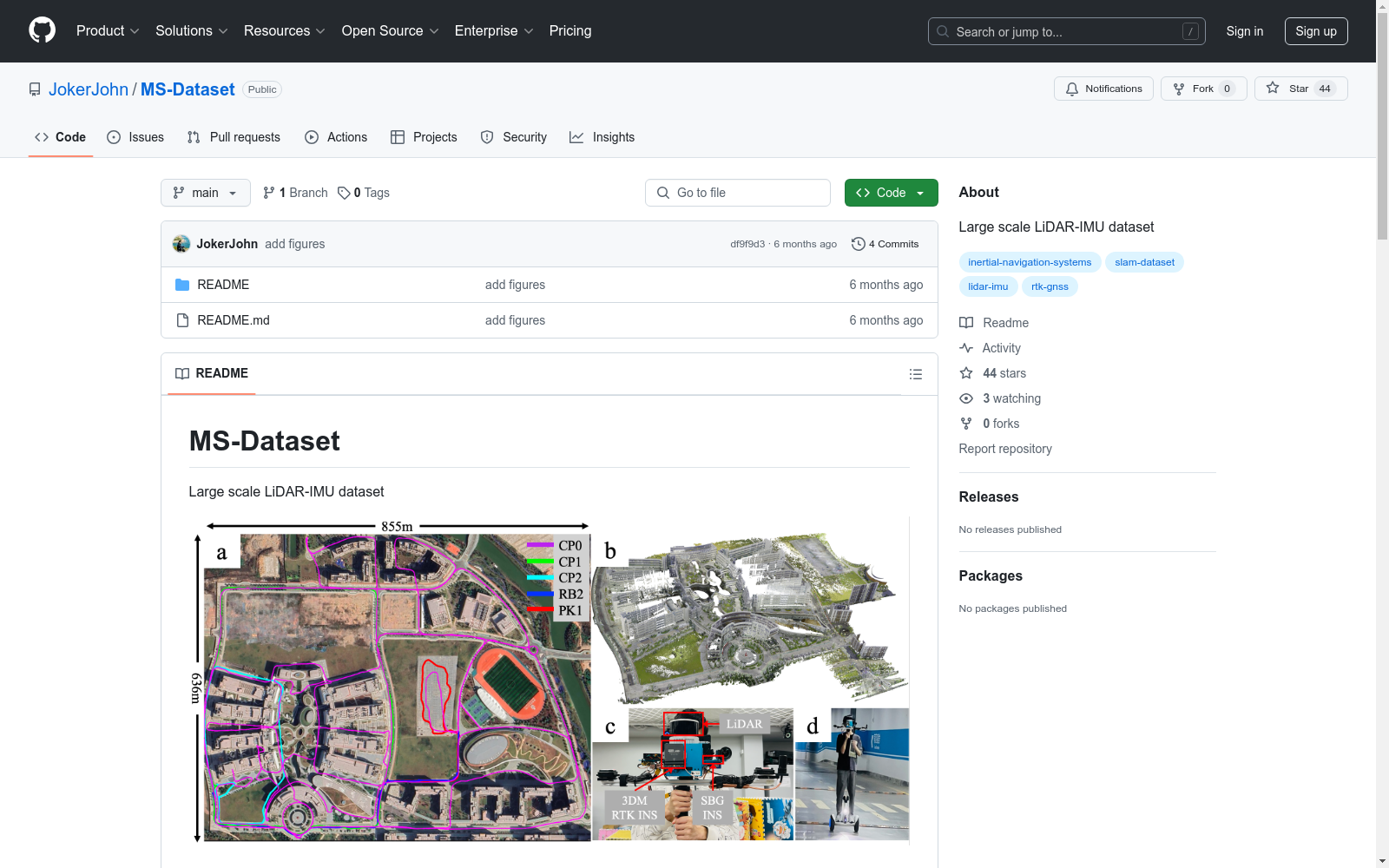
大型LiDAR-IMU数据集,包含多种传感器配置,如Pandar XT32、SBG INS、3DM-GQ7 INS等,以及可选的Mono Flir RGB相机和地面真实RGB点云地图。
Large-scale LiDAR-IMU dataset with multiple sensor configurations, including Pandar XT32, SBG INS, 3DM-GQ7 INS, as well as an optional Mono Flir RGB camera and ground-truth RGB point cloud map.
创建时间:
2024-06-24
原始信息汇总
MS-Dataset
大型 LiDAR-IMU 数据集
传感器配置
- Pandar XT32,精度 +-0.5cm
- SBG INS:100Hz IMU + GNSS + EKF 滤波器
- 3DM-GQ7 INS:700Hz IMU + 双 GNSS-RTK + 30Hz 滤波器,精度 >= 1.4cm
- Mono Flir RGB 相机(可选),由于 USB3.0 限制,难以同时采集 RTK-GNSS 和 RGB 相机数据
- 地面真实 RGB 点云地图(室内 -> 室外,4mm),由 Leica BLK360 和 RTC360 采集
地面真实轨迹
- 来自 INS,协方差小于 0.005m。用户也可以使用我的脚本生成地面真实轨迹。
- 用户可以使用我的脚本从 RTK-GNSS 1 或 RTK-GNSS 2 生成地面真实轨迹,但仅包含 x y z yaw。
- KML 文件,可直接通过我的脚本导入谷歌地图。
数据描述
| 数据集 | 描述 | 传感器 | 下载链接 | 地面真实 | 备注 |
|---|---|---|---|---|---|
| Calib-IMU-Intrinsinc | |||||
| Calib-Camera-LiDAR | |||||
| PK01 | 退化停车场 | ||||
| RB02 | |||||
| RB03 | |||||
| CP05 |
搜集汇总
数据集介绍
构建方式
MS-Dataset的构建基于多种高精度传感器,包括Pandar XT32激光雷达、SBG INS和3DM-GQ7 INS,以及可选的Mono Flir RGB相机。数据集的采集过程中,使用了多种传感器配置,确保了数据的多样性和精度。特别是,通过结合GNSS和IMU数据,以及EKF滤波器,生成了高精度的轨迹数据。此外,通过Leica BLK360和RTC360采集的RGB点云地图,进一步增强了数据集的真实性和完整性。
特点
MS-Dataset的显著特点在于其高精度和多传感器融合。数据集不仅包含了高频的IMU数据和GNSS数据,还提供了多种传感器配置下的轨迹数据,使得研究者可以在不同环境下进行算法验证。此外,数据集还提供了详细的传感器校准数据和RGB点云地图,为三维重建和定位研究提供了丰富的资源。
使用方法
MS-Dataset的使用方法相对直观,用户可以通过提供的脚本生成高精度的轨迹数据,并将其导入Google地图进行可视化。此外,数据集还提供了详细的传感器数据描述和下载链接,方便用户进行数据分析和算法开发。对于不同传感器的适配,用户可以通过rostopic命令查看传感器字段,进行相应的数据处理和适配。
背景与挑战
背景概述
MS-Dataset,一个大规模的LiDAR-IMU数据集,由知名研究机构或团队于近期创建。该数据集的核心研究问题聚焦于高精度定位与地图构建,特别是在复杂环境中的应用。通过整合多种高精度传感器,如Pandar XT32 LiDAR、SBG INS和3DM-GQ7 INS,MS-Dataset旨在提供一个全面的数据平台,以支持自动驾驶、机器人导航等前沿领域的研究。其影响力在于为相关领域的算法开发和验证提供了宝贵的真实世界数据,推动了高精度定位技术的进步。
当前挑战
MS-Dataset在构建过程中面临多项挑战。首先,整合多种高精度传感器的数据同步与融合是一个复杂的技术难题,尤其是当传感器如RTK-GNSS和RGB相机因物理限制难以同时采集数据时。其次,生成高精度的Ground Truth轨迹和点云地图需要精确的校准和处理,这对数据处理算法提出了高要求。此外,适应不同传感器配置的数据处理和算法适配也是一个重要的挑战,尤其是在传感器参数和输出格式多样化的背景下。
常用场景
经典使用场景
在自动驾驶和机器人导航领域,MS-Dataset以其大规模的LiDAR-IMU数据集而闻名。该数据集的经典使用场景包括高精度地图构建、实时定位与地图更新(SLAM)以及传感器融合技术。通过结合高频IMU数据和LiDAR点云,研究人员能够实现对环境的高精度感知和定位,从而提升自动驾驶系统的安全性和可靠性。
实际应用
在实际应用中,MS-Dataset为自动驾驶车辆和机器人提供了关键的技术支持。例如,自动驾驶汽车可以利用该数据集进行高精度地图的构建和实时更新,从而在复杂的城市环境中实现安全导航。此外,机器人导航系统也可以通过该数据集进行传感器校准和数据融合,提升其在室内外环境中的定位和路径规划能力。
衍生相关工作
基于MS-Dataset,许多经典工作得以展开。例如,研究人员开发了多种SLAM算法,通过结合LiDAR和IMU数据,实现了高精度的实时定位和地图构建。此外,该数据集还促进了传感器融合技术的研究,推动了多传感器系统的集成和优化。这些衍生工作不仅提升了自动驾驶和机器人导航的性能,也为相关领域的进一步研究提供了丰富的数据支持。
以上内容由遇见数据集搜集并总结生成


