M2P2
收藏arXiv2024-10-02 更新2024-10-04 收录
下载链接:
https://cs.gmu.edu/~xiao/Research/M2P2/
下载链接
链接失效反馈官方服务:
资源简介:
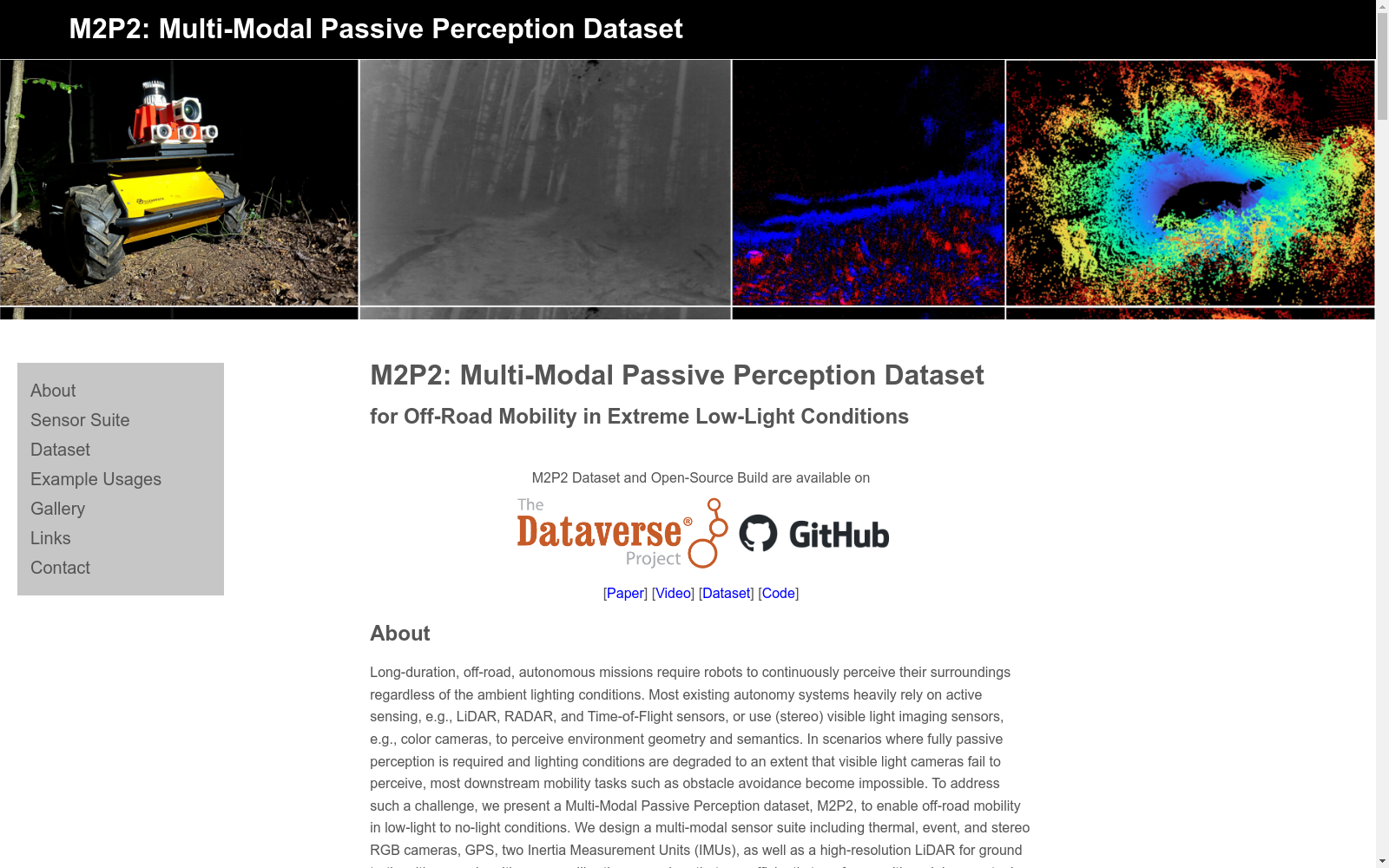
M2P2数据集是由乔治梅森大学创建的多模态被动感知数据集,专门用于极端低光条件下的越野移动性研究。该数据集包含10小时的数据,覆盖32公里的范围,涵盖了从良好光照到无光的不同光照条件以及从铺砌到越野的不同地形。数据集内容包括热成像、事件流、立体RGB图像、GPS数据、两个惯性测量单元(IMU)以及高分辨率LiDAR点云。数据集的创建过程包括多传感器校准,以确保多模态感知流的有效转换。该数据集主要应用于解决极端低光条件下机器人越野移动性的挑战,通过端到端学习和经典规划方法展示被动感知的可能性。
The M2P2 dataset is a multimodal passive perception dataset developed by George Mason University, specifically tailored for research on robotic off-road mobility under extreme low-light conditions. This dataset encompasses 10 hours of collected data spanning a 32-kilometer traversal range, covering a wide spectrum of lighting conditions from fully illuminated environments to total darkness, as well as diverse terrain types ranging from paved roads to off-road terrain. The dataset includes thermal imaging, event streams, stereo RGB images, GPS data, two Inertial Measurement Units (IMUs), and high-resolution LiDAR point clouds. The dataset construction process incorporates multi-sensor calibration procedures to ensure effective alignment and transformation of the multimodal perception data streams. This dataset is primarily used to address the challenges of robotic off-road mobility under extreme low-light conditions, demonstrating the feasibility of passive perception through end-to-end learning and classical planning methods.
提供机构:
乔治梅森大学
创建时间:
2024-10-02
搜集汇总
数据集介绍
构建方式
M2P2数据集的构建基于多模态传感器套件,包括热成像、事件、立体RGB摄像头、GPS、两个惯性测量单元(IMU)以及高分辨率LiDAR,用于在极端低光条件下实现越野移动。该数据集通过一种新颖的多传感器校准程序,将多模态感知流高效地转换为通用坐标系。数据集涵盖了10小时、32公里的数据,包括机器人里程计和动作数据,覆盖了从良好光照到无光照条件以及从铺砌到非铺砌地形。
使用方法
M2P2数据集适用于开发和测试在极端低光条件下进行越野移动的算法。研究者可以利用该数据集进行端到端学习,训练模型以基于热成像输入输出线性和角速度。此外,数据集还可用于经典规划方法,通过将热成像图像转换为深度图像,进而生成激光扫描数据,指导机器人进行障碍物规避。数据集的ROS-bag格式确保了多模态传感器输入的时间对齐,便于进行多传感器融合和校准研究。
背景与挑战
背景概述
M2P2数据集由George Mason University和DEVCOM Army Research Laboratory的研究团队创建,专注于极端低光条件下越野移动机器人的多模态被动感知。该数据集的核心研究问题在于解决现有自主系统在无光或极低光环境下感知能力的不足,特别是在需要完全被动感知以保持隐秘性的场景中。通过集成热成像、事件相机、立体RGB相机、GPS、IMU和LiDAR等多种传感器,M2P2数据集旨在为机器人在极端低光条件下的感知和导航提供支持,推动相关领域技术的发展。
当前挑战
M2P2数据集面临的挑战主要包括两个方面:一是解决极端低光环境下现有传感器性能下降的问题,特别是在无光条件下可见光相机的失效;二是实现多模态传感器的高效校准和同步,以确保各传感器数据在同一坐标系下的准确融合。此外,数据集的构建过程中还需克服传感器在恶劣环境条件下的噪声干扰,以及在复杂地形和光照变化下的数据采集难题。这些挑战不仅影响了数据集的质量,也对后续算法开发和应用提出了高要求。
常用场景
经典使用场景
M2P2数据集的经典使用场景在于极端低光条件下的越野移动任务。该数据集通过整合热成像、事件相机和立体RGB相机等多种传感器,为机器人提供了在无光或极低光环境下感知周围环境的能力。这种多模态感知技术使得机器人能够在完全黑暗或光线极弱的环境中进行障碍物规避和路径规划,从而实现全天候的自主导航。
解决学术问题
M2P2数据集解决了现有自主机器人系统在极端低光条件下感知能力不足的问题。传统系统依赖于主动感知技术,如激光雷达和雷达,这些技术在恶劣天气条件下表现不佳,且可能暴露机器人位置。M2P2通过引入被动感知技术,如热成像和事件相机,显著提升了机器人在无光环境下的感知能力,为学术界提供了研究极端低光条件下自主导航的新工具。
实际应用
M2P2数据集的实际应用场景广泛,包括但不限于军事行动中的隐蔽导航、夜间搜救任务、以及在无光或低光环境下的农业和基础设施检查。在这些应用中,机器人需要在不发出任何主动信号的情况下进行环境感知和导航,以确保任务的隐蔽性和安全性。M2P2的多模态传感器配置和精确的多传感器校准程序,使其成为这些实际应用中的理想选择。
数据集最近研究
最新研究方向
在极端低光条件下实现越野移动的自主感知系统研究中,M2P2数据集的最新研究方向聚焦于多模态被动感知技术的整合与优化。该数据集通过集成热成像、事件相机和立体RGB相机等多种传感器,旨在克服传统主动感知技术在恶劣环境中的局限性。研究者们正致力于开发高效的传感器校准方法,以确保多模态数据在同一坐标系下的精确融合,从而提升机器人在低光至无光环境中的导航能力。此外,基于该数据集的初步实验结果表明,通过端到端学习和经典规划方法,仅依赖被动感知即可实现极端低光条件下的越野移动,这为未来在军事、搜救等领域的应用提供了新的可能性。
相关研究论文
- 1M2P2: A Multi-Modal Passive Perception Dataset for Off-Road Mobility in Extreme Low-Light Conditions乔治梅森大学 · 2024年
以上内容由遇见数据集搜集并总结生成


