SLAM&Render
收藏arXiv2025-04-21 更新2025-04-22 收录
下载链接:
https://samuel-cerezo.github.io/SLAM&Render
下载链接
链接失效反馈官方服务:
资源简介:
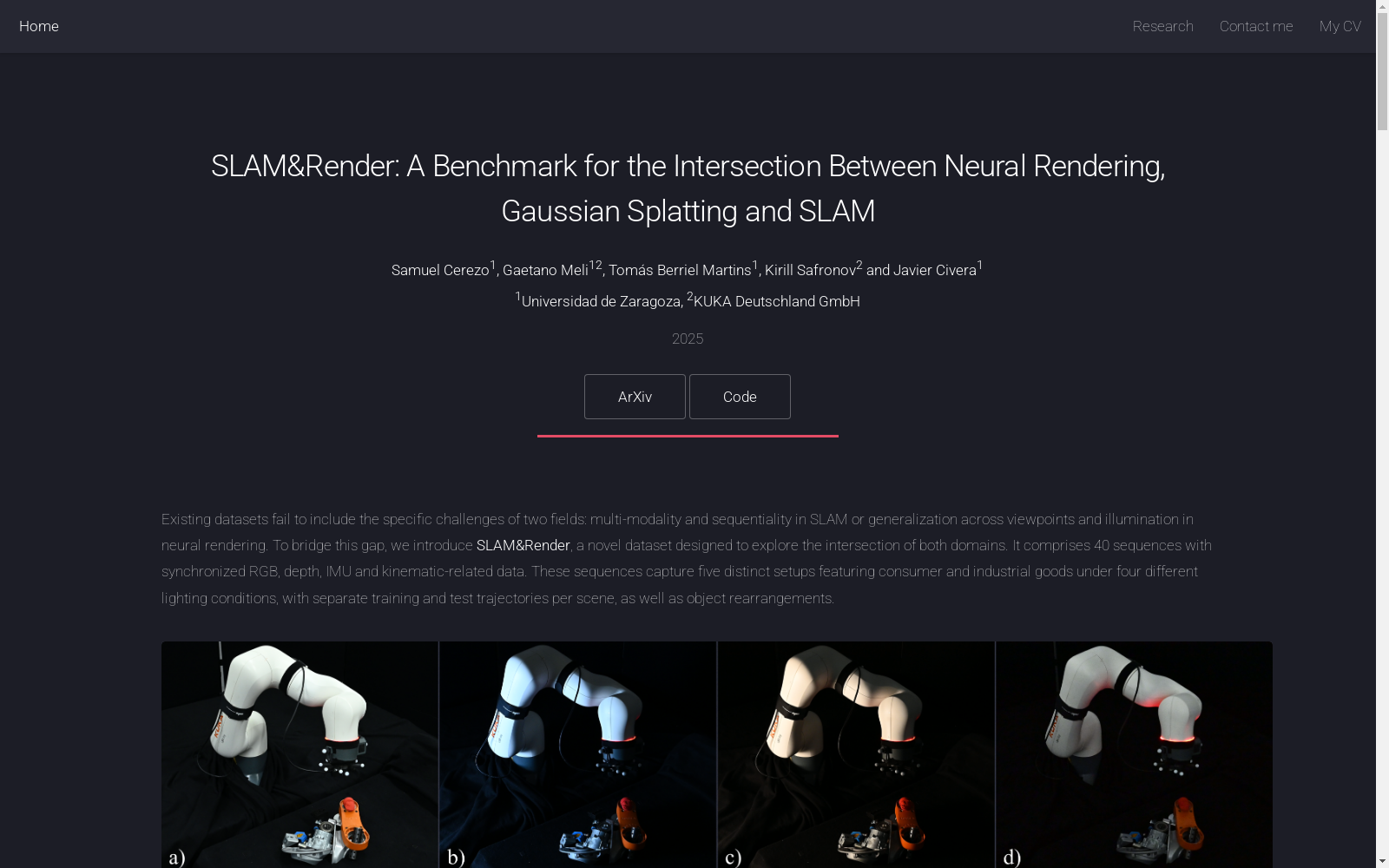
SLAM&Render是一个新颖的数据集,旨在桥接SLAM和新型视图渲染之间的研究。由40个同步RGB、深度、IMU、机器人运动学数据和地面真实位姿流的序列组成。数据集的序列跨越五个不同的场景设置,包括消费者和工业对象,四种不同的光照条件。每个场景都有单独的训练和测试轨迹以及对象的重新排列。
SLAM&Render is a novel dataset designed to bridge the research gap between SLAM and novel view rendering. It comprises 40 synchronized sequences of RGB, depth, IMU, robotic kinematic data, and ground-truth pose streams. The dataset’s sequences span five distinct scene setups, encompassing both consumer and industrial objects, alongside four different lighting conditions. Each scenario features separate training and testing trajectories, as well as object rearrangements.
提供机构:
Departamento de Informática e Ingeniería de Sistemas, Universidad de Zaragoza; Technology & Innovation Center, KUKA Deutschland GmbH
创建时间:
2025-04-18
搜集汇总
数据集介绍
构建方式
SLAM&Render数据集通过精心设计的实验环境构建,采用KUKA LBR iisy 3 R760机械臂搭载Intel RealSense D435i相机进行多模态数据采集。数据采集系统包含十二台OptiTrack PrimeX 13W运动捕捉相机组成的标定网络,实现了毫米级精度的位姿真值标注。数据集包含40个序列,涵盖五种不同场景配置和四种光照条件,每个场景均提供独立的训练和测试轨迹。通过ROS2框架实现了RGB-D图像(30Hz)、IMU数据(210Hz)与机械臂关节角度(25Hz)的精确时间同步,并采用球形谐波编码处理光照变化,为神经渲染与SLAM的交叉研究提供了标准化基准。
特点
该数据集的核心价值体现在其多模态融合与场景多样性设计。除常规的RGB-D和IMU数据外,创新性地引入了机械臂运动学参数,为研究传感器融合算法提供了新维度。五种场景配置包含透明/不透明物体、反光材质等挑战性元素,配合自然光、冷光、暖光和全暗四种光照条件,系统性地评估算法在真实环境中的鲁棒性。独特的物体重排设计可验证场景理解的泛化能力,而独立采集的训练/测试轨迹则有效避免了视角过拟合问题,这些特性使其成为首个同时满足神经渲染泛化性评估与SLAM系统验证需求的基准数据集。
使用方法
使用该数据集时,研究者可通过提供的ROS2工具包直接加载时间对齐的多模态数据流。对于神经渲染任务,建议分别利用训练轨迹优化辐射场或高斯泼溅模型,并在独立测试轨迹上评估视角泛化性能,配套的评估脚本可计算PSNR、SSIM和LPIPS等指标。SLAM研究则可结合IMU与机械臂运动学数据开发融合算法,通过ATE RMSE指标量化定位精度。数据集官网提供相机内外参标定文件、坐标转换工具及基线算法实现,支持以单场景或多场景组合方式进行消融实验。特别注意事项包括:深度图像已对齐到彩色坐标系,真值位姿采用世界坐标系下的四元数表示,所有长度单位统一为毫米。
背景与挑战
背景概述
SLAM&Render数据集由萨拉戈萨大学和KUKA Deutschland GmbH的研究团队于2025年推出,旨在填补同步定位与建图(SLAM)和神经渲染领域交叉研究的空白。该数据集包含40个序列,涵盖RGB、深度、IMU、机器人运动学数据及真实位姿信息,特别设计了四种光照条件和物体重排场景,为评估高斯溅射和NeRF等新型渲染技术在SLAM中的应用提供了标准化平台。其多模态数据同步采集方案和工业级标定精度,显著推动了机器人视觉与神经表示融合研究的发展。
当前挑战
该数据集核心挑战体现在两方面:领域问题上,需解决神经渲染视角泛化性与SLAM实时多模态处理的矛盾,如高斯溅射在动态光照下的稳定性;构建过程中,克服了机械臂运动精度与光学动作捕捉系统的毫米级同步难题,并通过复杂标定流程实现RGB-D相机与IMU的时空对齐。测试轨迹独立设计进一步揭示了现有方法对训练轨迹过拟合的潜在缺陷,为跨轨迹泛化研究设立新基准。
常用场景
经典使用场景
SLAM&Render数据集在神经渲染、高斯泼溅与SLAM技术交叉领域的研究中具有重要应用。该数据集通过提供同步的RGB、深度、IMU及机器人运动学数据,为研究者提供了一个多模态、多光照条件下的基准测试平台。经典使用场景包括评估新型SLAM算法在机器人操作中的性能,以及验证神经渲染技术在复杂光照和视角变化下的泛化能力。
解决学术问题
SLAM&Render数据集解决了当前研究中缺乏多模态数据融合基准的问题,填补了神经渲染与SLAM交叉领域的空白。其提供的多样化光照条件、物体重排及独立训练/测试轨迹,有助于研究者深入探讨算法在真实场景中的鲁棒性和泛化性能,推动了视觉SLAM与神经渲染技术的协同发展。
衍生相关工作
基于SLAM&Render数据集,已衍生出多项创新性研究。例如Gaussian Splatting SLAM通过融合高斯泼溅与运动学数据优化相机跟踪精度;FeatSplat则利用该数据集验证了抗视角过拟合的神经渲染方法。这些工作显著推动了动态场景建模与实时SLAM的技术边界。
以上内容由遇见数据集搜集并总结生成


