Task-Oriented Human Grasp Synthesis Dataset
收藏arXiv2025-07-15 更新2025-07-17 收录
下载链接:
https://hcis-lab.github.io/TOHGS/
下载链接
链接失效反馈官方服务:
资源简介:
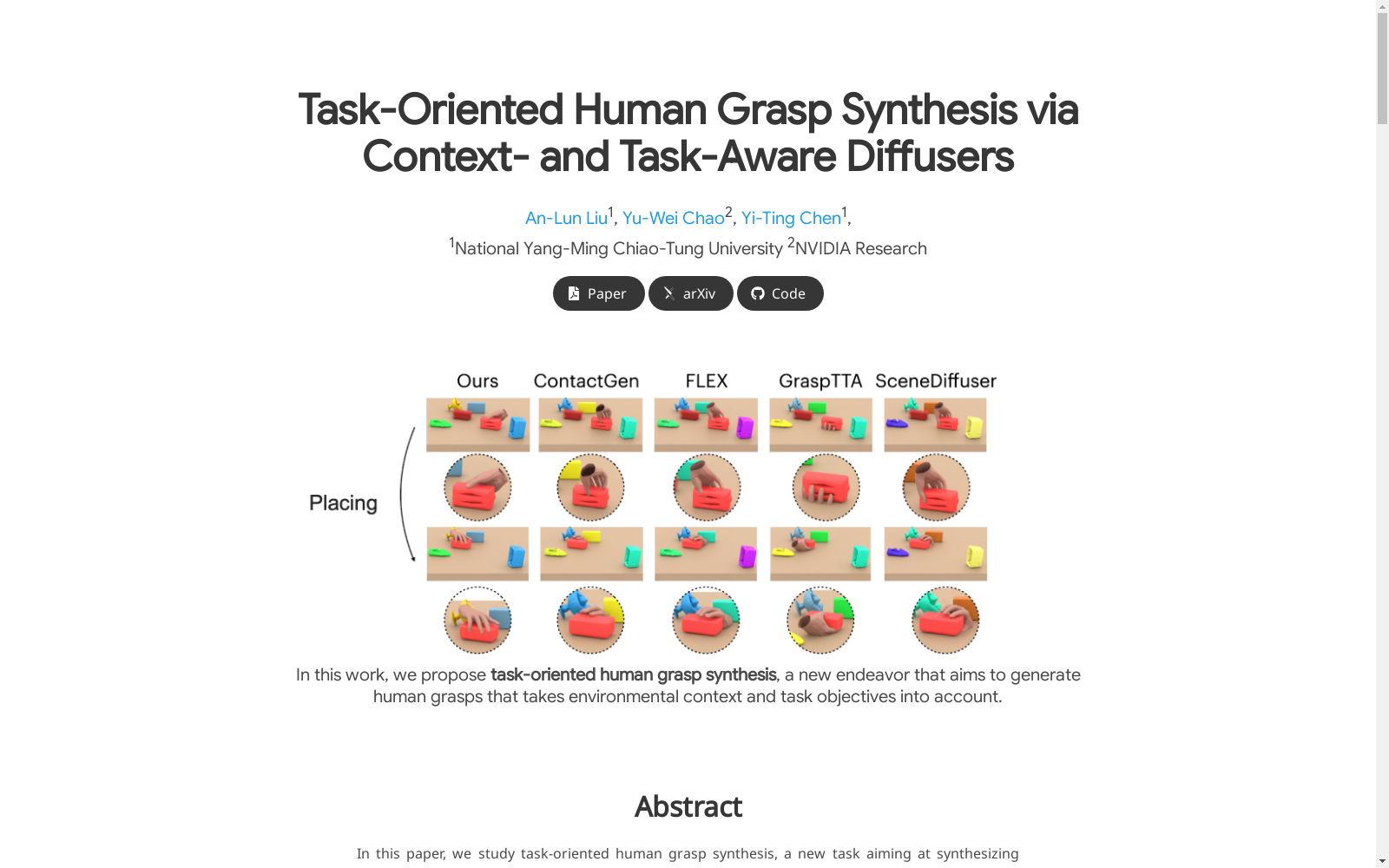
本研究介绍了一个新的数据集,名为“面向任务的人类抓握合成数据集”,该数据集由国立阳明交通大学和NVIDIA合作创建。该数据集包含571,908个放置任务抓握、2,989个堆叠任务抓握和807,028个货架任务抓握。数据集的创建是为了支持开发并评估新的任务导向的人类抓握合成任务。该数据集包含各种日常物品的抓握数据,如瓶子、罐子、文具、玩具、食品、鞋子和3C电子产品。数据集的创建过程包括使用DexGraspNet生成高质量的抓握数据,并通过物理仿真和手动筛选来确保抓握的物理可行性和人类相似性。该数据集适用于计算机视觉、机器人和人机交互等领域的研究,旨在解决在复杂环境下进行无碰撞抓握的问题。
提供机构:
国立阳明交通大学
创建时间:
2025-07-15
搜集汇总
数据集介绍
构建方式
该数据集的构建基于一个系统化的流程,首先从DexGraspNet中选取104种日常物品,并针对堆叠任务设计了23种几何形状的砖块模型。通过物理引擎PyBullet模拟场景,确保初始和目标配置的有效性。随后,利用DexGraspNet生成高质量的人类抓取姿势,并通过自动和手动过滤去除不符合物理可行性和人类习惯的抓取。最终,数据集包含超过138万个任务导向的人类抓取姿势,涵盖放置、堆叠和上架三种任务。
特点
该数据集的特点在于其任务导向性和场景感知能力。它不仅关注物体与手的交互,还整合了环境上下文和任务目标信息,通过任务感知接触图(task-aware contact maps)捕捉多模态分布。数据集包含丰富的日常物品和几何砖块,覆盖了放置、堆叠和上架三种常见任务,每种任务均需避免碰撞并满足功能性需求。此外,数据集通过严格的物理仿真和人工筛选确保了抓取姿势的物理合理性和人类相似性。
使用方法
该数据集的使用方法主要包括两个阶段:首先通过ContactDiffuser预测任务感知接触图,随后利用GraspDiffuser生成任务导向的人类抓取姿势。输入为初始和目标场景的点云,输出为符合任务需求且避免碰撞的抓取姿势。研究者可通过评估指标(如穿透体积、模拟位移和任务得分)量化抓取质量。此外,数据集支持生成多样化的抓取姿势,适用于增强现实、机器人操作和人机交互等领域的研究与应用。
背景与挑战
背景概述
Task-Oriented Human Grasp Synthesis Dataset是由国立阳明交通大学与NVIDIA的研究团队于2025年提出的创新数据集,专注于任务导向的人体抓取合成研究。该数据集突破了传统抓取合成仅考虑物体-手交互的局限,首次整合了场景上下文与任务目标的双重约束,包含57万条放置任务、2,989条堆叠任务和80万条搁置任务的抓取样本。其核心创新在于提出了任务感知接触图的概念,通过扩散模型构建两阶段合成框架,显著提升了抓取动作的物理合理性与任务完成度。该数据集为增强现实、机器人操作等领域提供了关键基准,推动了具身智能与场景理解的前沿发展。
当前挑战
该数据集面临三大核心挑战:在领域问题层面,需解决复杂场景中多物体碰撞规避与任务目标协同优化的难题,传统物体中心化表征难以处理堆叠等任务中的动态空间关系;在构建过程中,小物体接触图预测的可靠性不足导致合成抓取易发生穿透现象,数据标注需平衡仿真精度与人工校验效率;在方法学层面,初始场景与目标场景点云的精确配准成为影响扩散模型性能的关键瓶颈,现有物理引擎在微小位移模拟上仍存在数值稳定性挑战。
常用场景
经典使用场景
Task-Oriented Human Grasp Synthesis Dataset 主要用于任务导向的人手抓取合成研究。该数据集通过结合场景上下文和任务目标,生成既符合物理合理性又避免碰撞的人手抓取姿态。其经典使用场景包括放置、堆叠和上架等日常任务,这些任务需要模型同时考虑环境中的障碍物和目标物体的功能性需求。
解决学术问题
该数据集解决了传统人手抓取合成方法中缺乏场景和任务意识的问题。传统方法通常仅关注物体与手的交互,而忽略了环境中的障碍物和任务的具体要求。通过引入任务感知接触图(task-aware contact maps),该数据集能够有效建模环境上下文和任务相关信息,从而生成更符合实际需求的抓取姿态。这一创新显著提升了抓取合成的物理合理性和任务完成率。
衍生相关工作
该数据集衍生了多项经典工作,例如基于扩散模型的ContactDiffuser和GraspDiffuser框架。这些工作通过任务感知接触图,显著提升了抓取合成的质量。此外,该数据集还推动了场景感知和任务导向的抓取合成研究,为后续工作提供了重要的基准和参考。
以上内容由遇见数据集搜集并总结生成


