TransforMerger
收藏arXiv2025-04-02 更新2025-04-08 收录
下载链接:
http://imitrob.ciirc.cvut.cz/publications/transformerger/
下载链接
链接失效反馈官方服务:
资源简介:
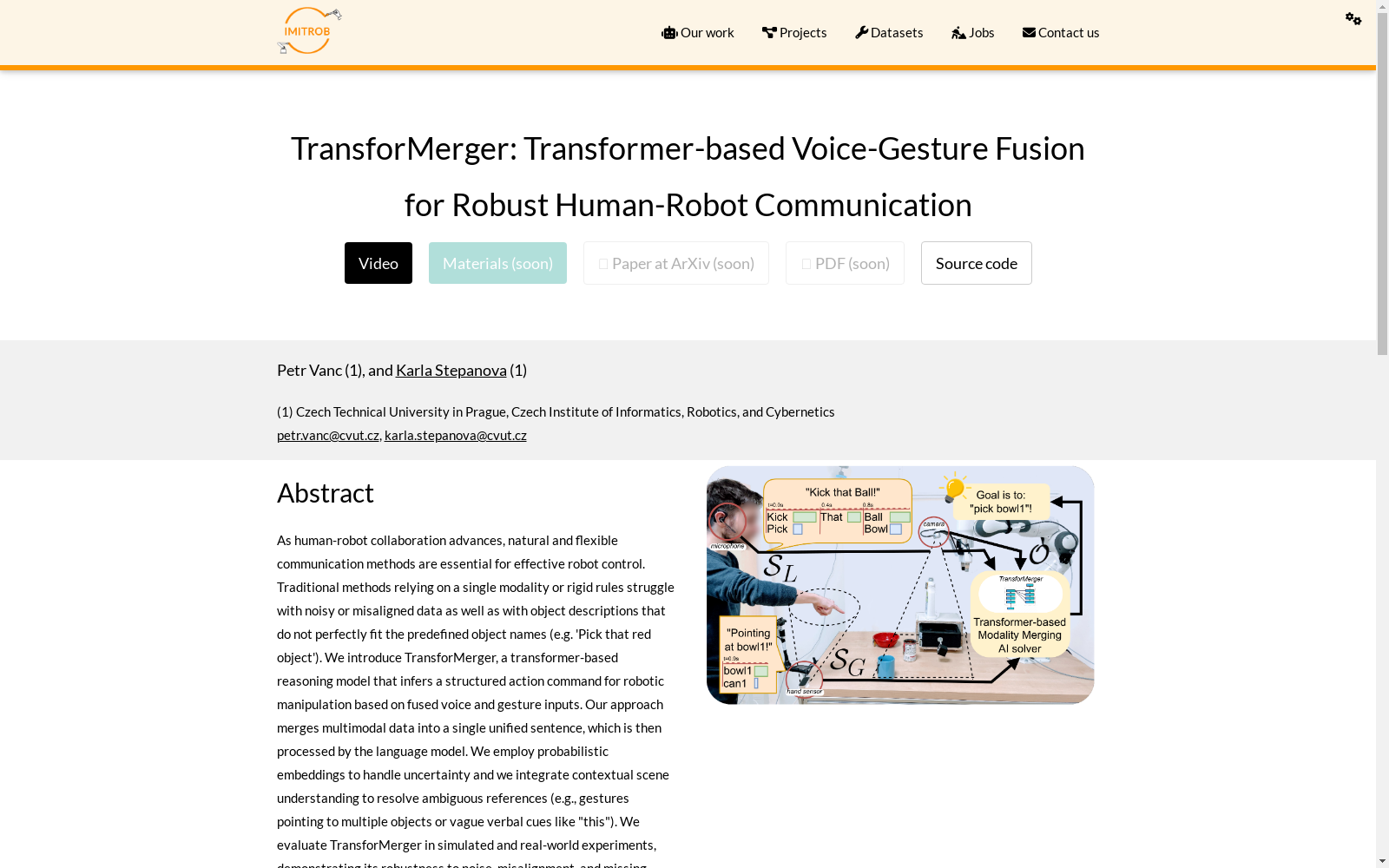
本文介绍了一种新的基于Transformer的模型TransforMerger,用于处理人机交互中的多模态数据(手势和语音)。文章提到使用了模拟和真实世界的双模态(手势和语言)数据集来评估模型,这些数据集包含了不同类型的噪声,并且有些数据集包含相互冲突的多模态信息。数据集的具体信息,如创建机构、大小、数据来源和创建过程等,在论文中没有详细描述。
提供机构:
捷克技术大学布拉格,捷克信息学、机器人学和控制系统研究所
创建时间:
2025-04-02
搜集汇总
数据集介绍
构建方式
TransforMerger数据集的构建基于多模态人机交互的实际需求,通过融合语音和手势输入来生成结构化的机器人操作指令。数据集的构建过程包括模拟和真实环境下的实验,其中语音命令通过Whisper模型转换为文本并生成概率表示,手势输入则通过Leap Motion传感器捕获并由Gesture Toolbox处理为概率分布。数据集还模拟了语音错误、填充词和时间错位等噪声,以增强模型的鲁棒性。
使用方法
TransforMerger数据集的使用方法包括多模态输入的预处理、融合和推理。用户可以通过语音和手势输入任务指令,系统将这些输入转换为概率表示并合并为一个统一的句子。随后,基于Transformer的语言模型处理合并后的输入,生成结构化的技能指令。数据集还支持场景嵌入,通过提供对象和属性信息来增强模型的上下文理解。用户可以通过调整噪声参数和任务场景来测试模型在不同条件下的性能。
背景与挑战
背景概述
TransforMerger数据集由捷克技术大学信息学、机器人与控制论研究所的Petr Vanc和Karla Stepanova团队于2025年提出,旨在解决人机交互中多模态融合的挑战。该数据集专注于通过结合语音和手势输入,生成结构化的机器人操作指令,以应对传统单模态或刚性规则方法在噪声、数据不对齐及模糊对象描述方面的不足。TransforMerger利用基于Transformer的推理模型,通过概率嵌入处理不确定性,并整合场景理解以解决模糊引用问题。其影响力体现在推动人机交互向更自然、灵活和鲁棒的方向发展,为多模态融合研究提供了新的基准。
当前挑战
TransforMerger数据集面临的挑战主要包括两个方面:领域问题的挑战和构建过程中的挑战。在领域问题方面,数据集需解决语音和手势输入的噪声、不对齐及模糊引用问题,例如手势指向多个对象或模糊的语音指令(如“这个”)。构建过程中的挑战包括多模态数据的同步与融合、概率嵌入的设计与实现,以及场景理解的整合。此外,数据集还需处理语音识别错误和手势识别的歧义性,确保生成的机器人指令准确且可执行。这些挑战要求模型具备强大的上下文推理能力和对不确定性的鲁棒处理。
常用场景
经典使用场景
TransforMerger数据集在机器人控制与多模态人机交互领域具有广泛的应用价值。其经典使用场景包括通过语音和手势的融合实现机器人操控,例如用户通过语音指令“拿起那个红色物体”并配合手势指向目标物体,系统能够准确理解并执行任务。该数据集特别适用于存在噪声、数据不对齐或模糊描述的场景,展现了其在复杂环境中的鲁棒性。
解决学术问题
TransforMerger数据集解决了多模态融合中的关键学术问题,包括噪声数据处理、模态间不对齐以及模糊语义解析。通过引入概率嵌入和上下文场景理解,该数据集能够有效处理手势指向多个物体或语音指令含糊不清的情况。其意义在于推动了基于Transformer的多模态融合技术的发展,为机器人自然交互提供了新的研究范式。
实际应用
在实际应用中,TransforMerger数据集被广泛用于家庭服务机器人、工业自动化以及医疗辅助机器人等领域。例如,在家庭环境中,用户可以通过自然语言和手势指挥机器人完成物品搬运或清洁任务;在工业场景中,工人可以通过多模态指令高效操控机械臂,提升生产效率。其鲁棒性和灵活性使其成为实际部署中的理想选择。
数据集最近研究
最新研究方向
近年来,TransforMerger数据集在人机交互领域引起了广泛关注,特别是在多模态融合与机器人控制方面。该数据集通过结合语音和手势输入,利用基于Transformer的推理模型生成结构化的机器人操作指令,显著提升了人机交互的自然性和鲁棒性。当前研究热点集中在如何进一步优化模型的概率嵌入机制,以更好地处理输入中的噪声和不确定性。此外,研究者们还探索了如何将场景理解与多模态数据融合相结合,以解决模糊指代问题,如手势指向多个物体或模糊的语言指令。这些研究不仅推动了人机交互技术的发展,也为智能家居、工业自动化等应用场景提供了新的解决方案。
相关研究论文
- 1TransforMerger: Transformer-based Voice-Gesture Fusion for Robust Human-Robot Communication捷克技术大学布拉格,捷克信息学、机器人学和控制系统研究所 · 2025年
以上内容由遇见数据集搜集并总结生成


