Objaverse and HANDAL
收藏arXiv2025-09-04 更新2025-11-24 收录
下载链接:
https://dense-functional-correspondence.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
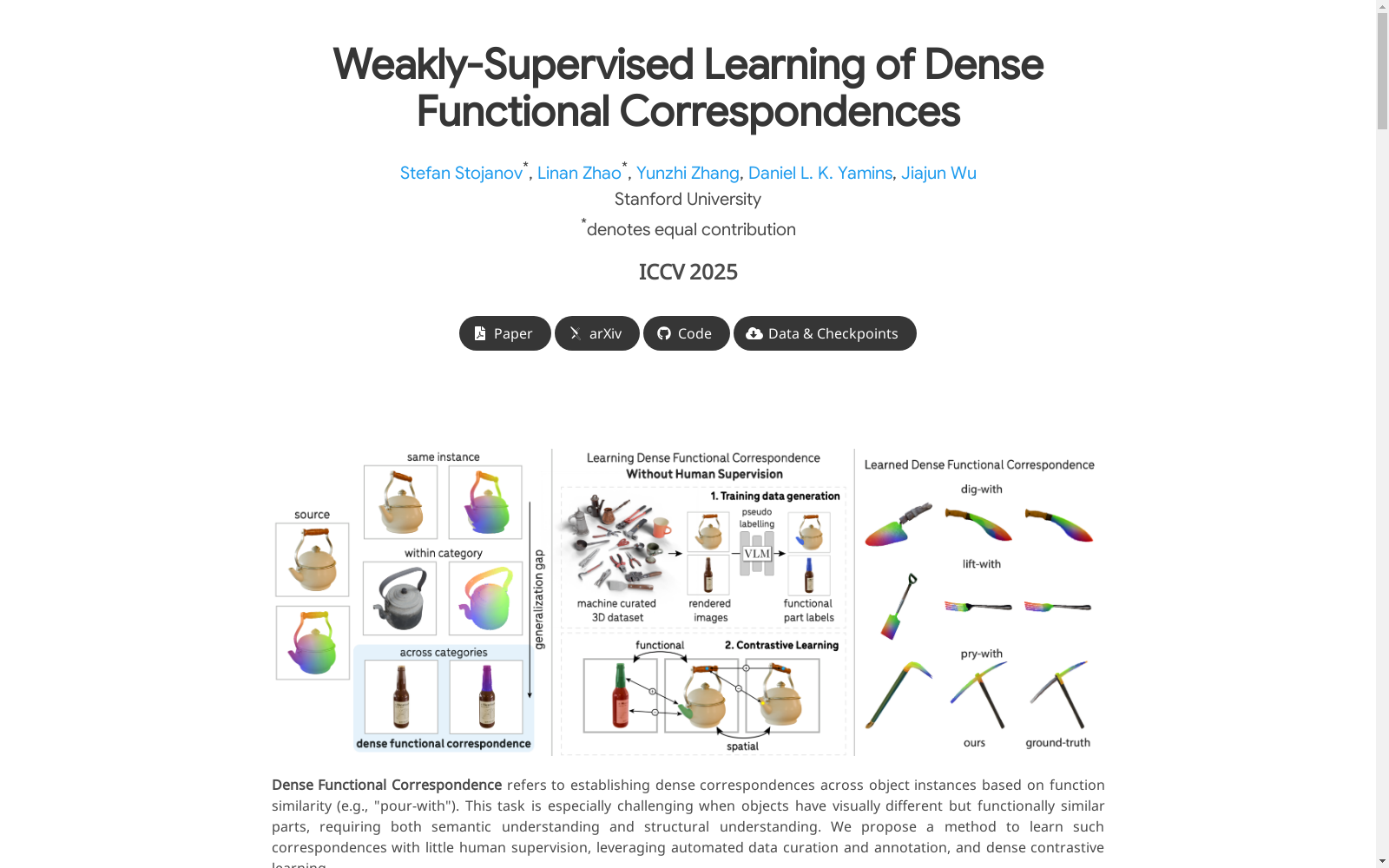
该数据集包含来自Objaverse和HANDAL的两个子集,用于评估密集功能对应任务。Objaverse子集包含950对3D资产, HANDAL子集包含190对资产。这些数据集是通过将功能部分对齐来构建的,以评估不同类别对象之间的功能相似性。
提供机构:
斯坦福大学
创建时间:
2025-09-04
搜集汇总
数据集介绍
构建方式
在密集功能对应研究领域,Objaverse与HANDAL数据集的构建采用了创新的弱监督范式。通过整合Objaverse的大规模合成3D资产与HANDAL的真实场景扫描数据,研究团队建立了基于功能语义的标注流程:首先利用GPT-4生成功能-对象分类体系,再通过视觉语言模型CogVLM对多视角渲染图像进行功能部件伪标注,最终通过3D空间对齐算法自动生成像素级对应关系。这种融合合成与真实数据的双重构建策略,既保证了标注精度又实现了规模扩展。
特点
该数据集的核心特征体现在三维空间的功能对齐范式与跨类别泛化能力。通过定义24种物体功能与160个对象类别的语义体系,构建了包含950组合成资产对与190组真实资产对的评估基准,其中85%的样本涉及跨类别对应关系。数据集首次实现了从稀疏功能关键点到密集像素级对应的范式转换,通过3D功能部件边界框投影与最小成本匹配算法,建立了兼具结构连续性与语义一致性的标注体系。特别设计的循环一致性评估指标,有效解决了无监督对应发现中的模糊性问题。
使用方法
该数据集支持端到端的密集功能对应学习与评估。研究人员可通过加载预对齐的3D资产对及其多视角渲染图像,直接获取像素级对应真值。在模型训练阶段,可利用伪标注的功能部件掩码实施对比学习,结合空间对应损失与功能语义损失优化特征嵌入。评估阶段提供标准化度量流程:基于归一化像素距离的标签迁移精度计算,以及融合特征相似度与循环一致性的对应发现评估。数据集同时支持功能条件化特征提取与部件掩码预测的联合训练,为机器人操作等下游任务提供结构化表征。
背景与挑战
背景概述
Objaverse and HANDAL数据集由斯坦福大学研究团队于2023年至2025年间构建,聚焦于跨类别密集功能对应关系的核心研究问题。该数据集通过整合大规模3D资产库与真实场景扫描数据,旨在解决计算机视觉与机器人领域中物体功能语义理解与空间结构对齐的复杂挑战。其创新性地利用视觉语言模型与自监督特征蒸馏技术,为物体形状重建、机器人模仿学习等应用提供了重要基准,显著推动了基于功能的物体对应关系研究范式的演进。
当前挑战
该数据集面临双重挑战:在领域问题层面,需解决跨类别物体间密集功能对应关系的精确建模,包括如何处理视觉差异显著但功能相似的物体部件对齐,以及克服自监督特征在跨类别泛化中的性能衰减问题;在构建过程中,遭遇大规模3D数据标注的可行性困境,通过开发基于视觉语言模型的伪标注流水线应对标注成本问题,同时需处理真实场景扫描数据的几何完整性修复与多视图一致性标注等复杂工程挑战。
常用场景
经典使用场景
在计算机视觉与机器人学领域,Objaverse与HANDAL数据集被广泛用于跨类别密集功能对应关系的研究。通过结合视觉语言模型的伪标签生成与多视图对比学习,该数据集为模型训练提供了丰富的合成与真实图像对,支持在功能相似但视觉差异显著的物体间建立像素级对应关系,例如匹配水壶嘴与瓶口以实现'倾倒'功能的精确对齐。
实际应用
在机器人操作与模仿学习场景中,该数据集支持将人类演示动作迁移至功能相似的新物体。例如,通过建立水壶与瓶子在'倾倒'功能下的密集对应,机器人可快速适应不同容器完成液体转移任务。其合成数据与真实数据的双重评估机制确保了模型在现实环境中的鲁棒性,为家庭服务、工业分拣等需处理未知物体的应用提供了关键技术支撑。
衍生相关工作
基于该数据集提出的密集功能对应框架,衍生出多项结合视觉基础模型的创新研究。例如,通过融合DINOv2的空间特征与CLIP的语义条件,开发出功能感知的特征嵌入网络;进一步探索了LoRA微调与FiLM层等跨模态融合技术。这些工作扩展了自监督表征在机器人抓取、物体重建等任务中的应用边界,形成了以功能对应为核心的跨类别泛化研究脉络。
以上内容由遇见数据集搜集并总结生成


