LangMap
收藏github2026-02-05 更新2026-02-06 收录
下载链接:
https://github.com/bo-miao/LangMap
下载链接
链接失效反馈官方服务:
资源简介:
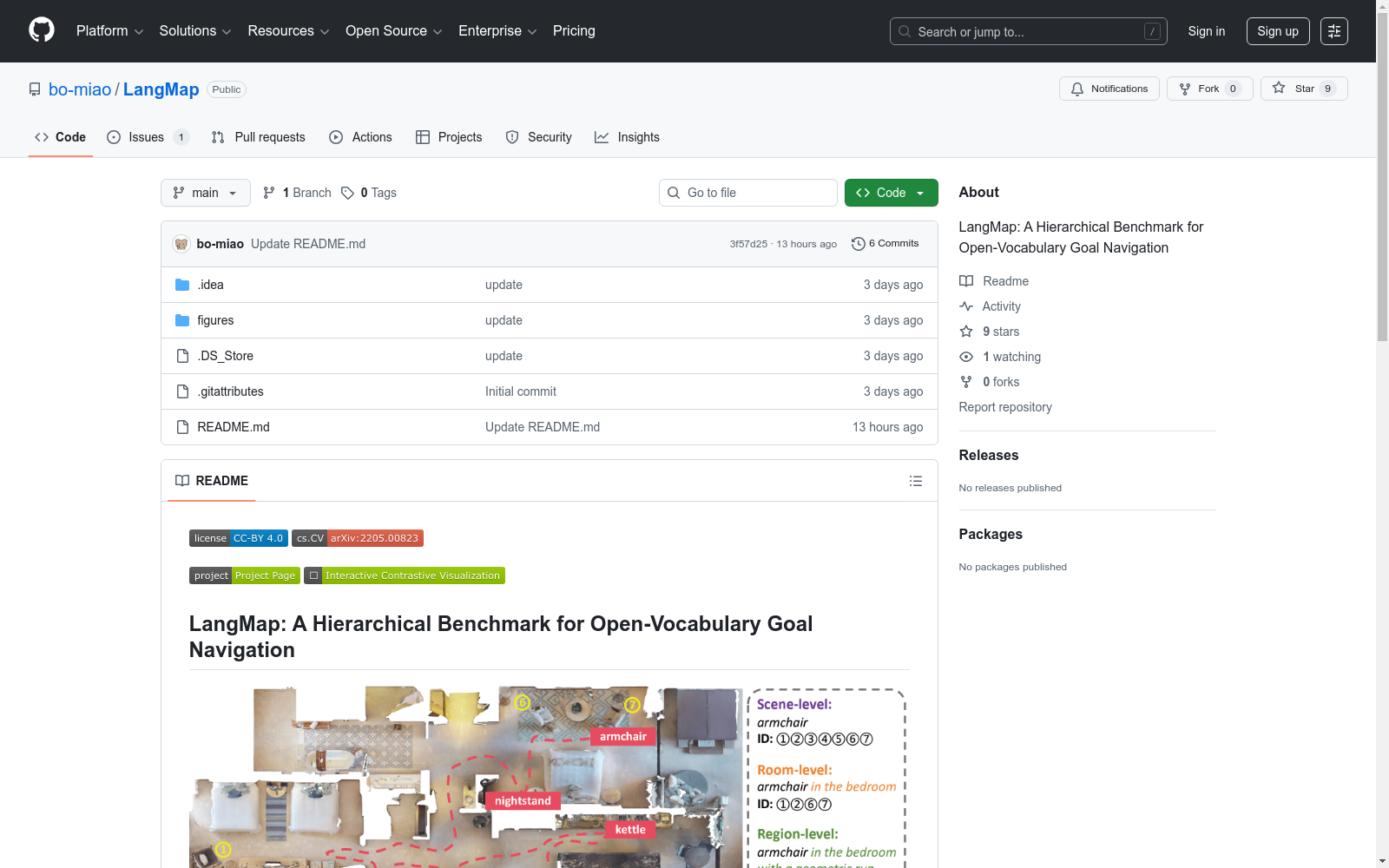
LangMap是第一个针对开放词汇语言条件目标导航任务的大规模基准测试,包含全面的经过人类验证的对比注释。该任务中,代理需要在四个语义层次(场景、房间、区域和实例)上达到目标。
LangMap is the first large-scale benchmark for open-vocabulary language-conditioned goal navigation tasks, which includes comprehensive human-validated contrastive annotations. In this task, an agent is required to reach the target across four semantic levels: scene, room, region, and instance.
创建时间:
2026-02-03
原始信息汇总
LangMap数据集概述
数据集基本信息
- 数据集名称:LangMap (Language as a Map)
- 核心任务:面向开放词汇的语言条件目标导航任务(Open-Vocabulary Language-Conditioned Goal Navigation),即HieraNav。
- 任务层级:代理需在四个语义层级上导航至目标:场景(scene)、房间(room)、区域(region)和实例(instance)。
- 基准性质:首个针对该任务的大规模基准,包含全面的人工验证对比注释。
数据源与构建
- 数据基础:基于真实世界的HM3D室内扫描数据构建。
标注与内容特色
- 区域标注:包含经过人工验证的区域标签,并提供区分性描述。
- 实例描述:包含覆盖414个对象类别的区分性实例描述。
- 指令类型:提供简洁和详细两种风格的指令,用于评估不同指令风格的效果。
发布状态
- 发布说明:完整基准即将发布。
相关链接
- 项目主页:https://bo-miao.github.io/LangMap/
- 交互式对比可视化演示:https://huggingface.co/spaces/bo-miao/LangMap
- 预印本论文:https://arxiv.org/html/2602.02220v1
- 许可证:CC-BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
搜集汇总
数据集介绍
构建方式
在计算机视觉与具身智能交叉领域,构建能够理解复杂语言指令的导航基准至关重要。LangMap基准的构建以真实世界的HM3D室内扫描数据为基础,通过系统化的语义层级划分,建立了涵盖场景、房间、区域和实例四个层次的开放词汇目标导航任务。其核心在于引入了经过人工验证的对比性标注,为每个区域和实例生成了具有区分性的语言描述,确保了标注的准确性与语义丰富度。
特点
该数据集的核心特点在于其首创的层次化开放词汇导航框架,将导航目标从宏观场景细化至具体物体实例,极大地拓展了任务的复杂性与现实意义。其标注体系尤为突出,不仅包含了覆盖414个物体类别的实例描述,还提供了简洁与详细两种风格的指令,以评估不同语言表达对智能体导航性能的影响。数据集建立在高质量的HM3D真实扫描环境之上,为模型提供了接近现实世界的训练与测试平台。
使用方法
研究人员可利用LangMap基准评估和训练语言条件化的视觉导航模型。使用前,需从指定平台获取数据集文件,并按照提供的环境配置说明搭建实验平台。模型训练与评估应遵循数据集中定义的四个语义层级任务,分别测试其在理解不同粒度语言指令下的导航能力。基准提供了标准化的评估协议与指标,便于对不同模型性能进行公平比较与深入分析。
背景与挑战
背景概述
在具身智能与视觉导航领域,开放词汇的语言条件目标导航任务旨在使智能体能够依据自然语言指令,在复杂环境中定位并抵达语义目标。LangMap基准数据集应运而生,由研究团队于2022年提出,其核心研究问题聚焦于构建一个层次化的开放词汇导航框架,涵盖场景、房间、区域和实例四个语义层级。该数据集基于真实世界的HM3D室内扫描数据构建,通过引入大规模人工验证的对比性标注,显著提升了导航模型对细粒度语言指令的理解与泛化能力,对推动开放词汇具身导航研究具有重要影响力。
当前挑战
LangMap数据集所针对的开放词汇目标导航任务,其核心挑战在于如何使智能体精准理解并执行跨越不同语义层级的自然语言指令,尤其是在复杂室内环境中处理大量相似区域与对象的歧义性问题。在数据集构建过程中,研究团队面临的主要挑战包括:对真实世界HM3D扫描数据进行多层次语义标注时,需确保区域标签的判别性描述具备人工验证的高可靠性;同时,为覆盖414个对象类别生成兼具简洁与详细风格的实例描述,要求标注过程在规模与质量之间取得平衡,以避免引入噪声或偏差。
常用场景
经典使用场景
在具身智能与机器人导航领域,LangMap数据集为开放词汇语言条件目标导航任务提供了标准化评估框架。该数据集基于真实世界的HM3D室内扫描环境构建,要求智能体依据自然语言指令,在场景、房间、区域和实例四个语义层级上精准定位并导航至目标位置。其经典使用场景聚焦于训练和验证视觉语言模型在复杂室内环境中的语义理解与路径规划能力,通过多层次的语言描述引导智能体完成从宏观场景到微观物体的递进式导航任务。
实际应用
在实际应用层面,LangMap数据集为家庭服务机器人、智能仓储管理系统以及虚拟现实导航助手等场景提供了关键技术支持。基于其构建的导航模型能够理解用户以自然语言表述的复杂目标,例如“请去客厅沙发旁边的茶几上取遥控器”,并在真实室内环境中实现精准定位与避障导航。这种能力显著提升了人机交互的自然性与效率,为智慧家居、工业自动化及辅助生活等领域的落地应用奠定了可靠基础。
衍生相关工作
围绕LangMap数据集,学术界已衍生出一系列经典研究工作,主要集中在多层次语义建模、对比性语言表征学习以及跨模态导航策略优化等领域。例如,部分研究利用其层级化标注结构开发了端到端的视觉语言导航模型,增强了模型对细粒度语义差异的判别能力;另有工作基于其提供的对比性描述,提出了新型的指令重述与对齐方法,显著提升了导航任务在开放词汇场景下的鲁棒性与泛化性能。
以上内容由遇见数据集搜集并总结生成


