USVTrack
收藏github2025-03-12 更新2025-03-07 收录
下载链接:
https://github.com/USVTrack/USVTrack
下载链接
链接失效反馈官方服务:
资源简介:
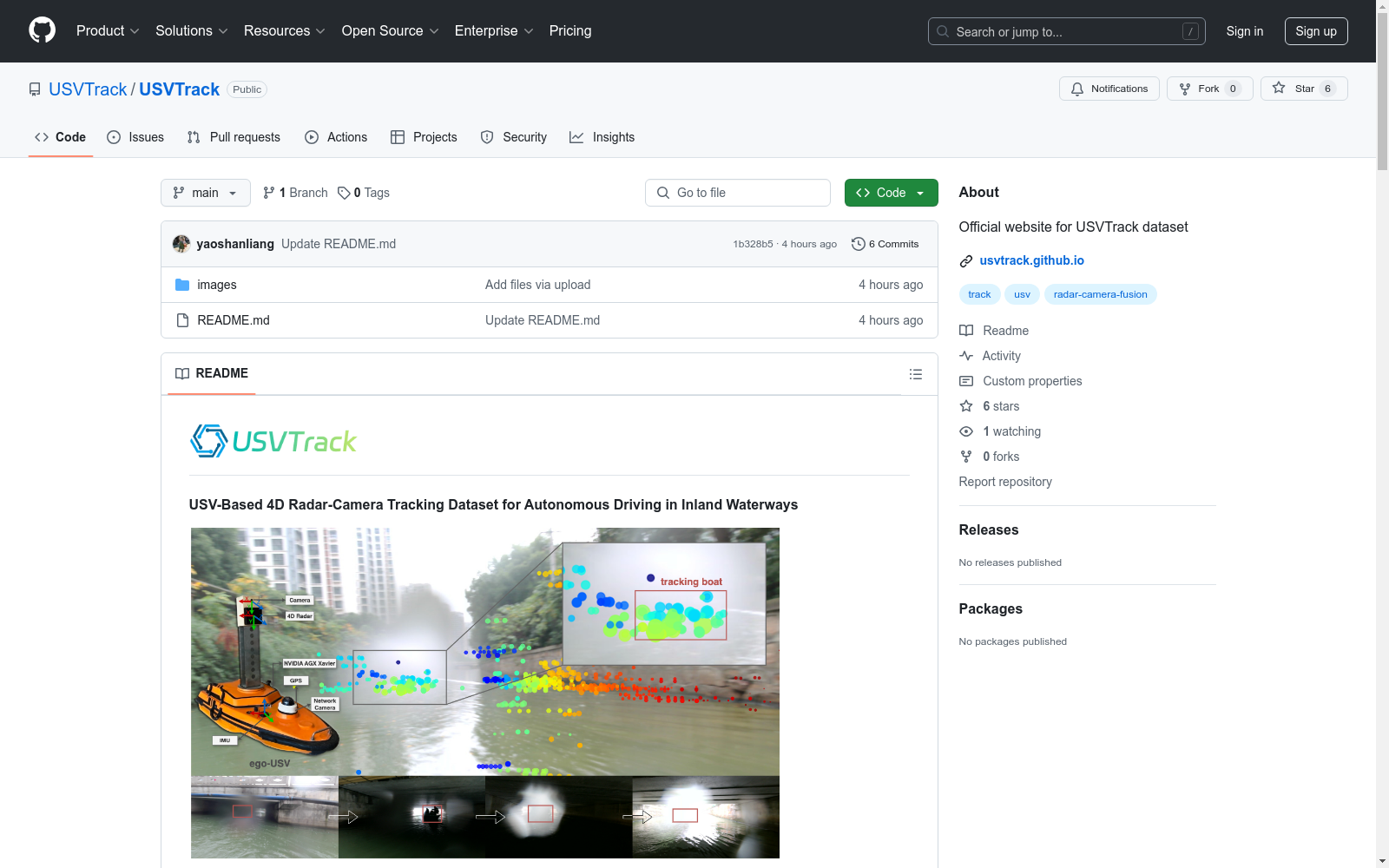
USVTrack是第一个基于无人水面车辆(USV)的内陆水道4D雷达-相机跟踪数据集,提供了来自多个传感器的数据,包括4D雷达、单目相机、GPS和IMU。数据集包含丰富的数据样本,涵盖各种水道(宽窄河流、湖泊、运河、护城河和码头)、不同的时间条件(白天、黄昏、夜晚)、天气条件(晴天、阴天、雨天、雪天)和光照条件(正常、昏暗、强烈)。提供了带有跟踪ID的2D边界框注释,并提供了一个工具包帮助研究人员处理、分析和训练数据集。
USVTrack is the first inland waterway 4D radar-camera tracking dataset based on Unmanned Surface Vehicles (USV). It provides data from multiple sensors, including 4D radar, monocular camera, GPS, and IMU. The dataset contains rich data samples covering various waterways (wide and narrow rivers, lakes, canals, moats, and docks), different temporal conditions (daytime, dusk, night), weather conditions (sunny, cloudy, rainy, snowy), and lighting conditions (normal, dim, intense). It is annotated with 2D bounding boxes paired with tracking IDs, and a dedicated toolkit is provided to assist researchers in processing, analyzing, and training on this dataset.
创建时间:
2025-03-06
原始信息汇总
USVTrack数据集概述
数据集简介
- 数据集名称:USVTrack
- 数据集类型:USV-based 4D雷达-相机跟踪数据集
- 应用领域:内陆水道自动驾驶
- 数据来源:包含来自多个传感器的数据,包括4D雷达、单目相机、GPS和IMU
- 数据多样性:包含不同水道(宽窄河流、湖泊、运河、护城河和码头)、不同时间段(白天、黄昏、夜晚)、不同天气条件(晴朗、多云、雨雪)和不同光照条件(正常、昏暗、强烈)的数据样本
- 数据标注:提供2D边界框和跟踪ID标注
- 工具包:提供用于处理、分析和训练数据集的工具包
- 评估指标:构建了相应的基准测试,并评估了用于目标检测和目标跟踪任务的主流算法
数据集结构
USVTrack (根目录)
- image # RGB图像
- 文件夹
- 000001.jpg
- 文件夹
- radar # 雷达文件
- 文件夹
- 000001.csv
- 文件夹
数据标注
- 雷达点云标签:
-1:无对象(仅用于雷达点云)1:船舶2:小船3:舰船
文件格式
- 雷达格式:每个CSV文件包含特定时间戳的一系列点
- GPS格式:包含时间戳、纬度、经度、卫星数量、海拔、真北航向、磁北航向、地面速度等信息
- IMU格式:包含时间戳、俯仰角、滚转角、偏航角、角速度、线速度、磁场强度等信息
数据集引用
- 引用信息:请使用以下引用信息当引用本数据集时
- 许可协议:CC BY-NC-SA 4.0,允许非商业研究用途的使用
搜集汇总
数据集介绍
构建方式
USVTrack数据集的构建基于多源异构传感器数据融合,集成4D雷达、单目相机、GPS及IMU等设备所采集的信息。该数据集针对内陆水道自主航行环境,收集了涵盖不同水道(宽阔河流、湖泊、运河、护城河及码头)、不同时间(白天、黄昏、夜晚)、天气(晴朗、多云、雨雪)及光照条件(正常、昏暗、强烈)的丰富数据样本,为水面目标物的二维边界框及追踪ID标注提供了详尽的标注信息。
特点
USVTrack作为首个基于USV的内陆水道4D雷达-相机追踪数据集,具有数据多样性、标注精确性及工具包支持等特点。其数据覆盖范围广泛,适应不同环境条件,提供了丰富的语义标签及精确的空间位置信息,为水面目标检测与追踪算法的研究和评估提供了坚实的基础。
使用方法
用户可通过访问数据集官方网站获取USVTrack数据集,并根据提供的工具包进行数据处理、分析及训练。数据集遵循CC BY-NC-SA 4.0许可证发布,可供非商业研究用途使用。用户在使用时需遵循相关许可规定,并在引用时标注正确的数据集引用信息。
背景与挑战
背景概述
USVTrack数据集,作为内陆水道自主驾驶领域的首个基于USV的4D雷达-摄像头追踪数据集,由研究人员于2025年3月6日发布。该数据集的创建,旨在推动无人水面舰艇(USV)在内陆水道中的自主导航技术发展。USVTrack集合了来自多个传感器的数据,包括4D雷达、单目摄像头、GPS和IMU,为研究人员提供了丰富的数据样本,涵盖了各种水道环境、时间条件、天气状况和光照条件。该数据集的发布,无疑为相关领域的研究提供了宝贵资源,对于推动水面无人驾驶技术具有显著影响力。
当前挑战
USVTrack数据集在研究领域中面临的挑战主要包括:1)如何利用数据集解决内陆水道中无人驾驶舰艇的实时跟踪问题,特别是在复杂多变的天气和光照条件下;2)在构建过程中,数据集的组织、标注和融合多源异构数据(如雷达、摄像头、GPS和IMU数据)的挑战。此外,数据集的实用性和可扩展性也是当前及未来研究需要解决的问题。
常用场景
经典使用场景
在自动驾驶领域,尤其是内陆水道中,USVTrack数据集作为首个基于USV的4D雷达-摄像头跟踪数据集,其经典使用场景主要集中于对水面上船只、舟艇等目标的检测与跟踪。该数据集整合了多种传感器数据,提供了丰富的样本,包括不同的水道环境、时间条件、天气状况及光照条件,为算法训练和评估提供了全面的支持。
解决学术问题
USVTrack数据集解决了传统数据集在复杂内陆水道环境中缺乏适用性的问题。通过提供2D边界框与跟踪ID注释,它帮助学者们克服了在多变的天气和光照条件下进行目标检测与跟踪的难题,从而推动了自动驾驶技术在水面环境中的应用研究。
衍生相关工作
USVTrack数据集的发布激发了众多相关研究工作,如基于该数据集的性能评估、算法改进以及针对特定场景的定制化解决方案。这些衍生工作不仅拓宽了数据集的应用范围,也进一步推动了自动驾驶技术在水面环境中的发展。
以上内容由遇见数据集搜集并总结生成


