CODrone
收藏arXiv2025-04-29 更新2025-04-30 收录
下载链接:
https://github.com/AHideoKuzeA/CODrone-A-Comprehensive-Oriented-Object-Detection-benchmark-for-UAV
下载链接
链接失效反馈官方服务:
资源简介:
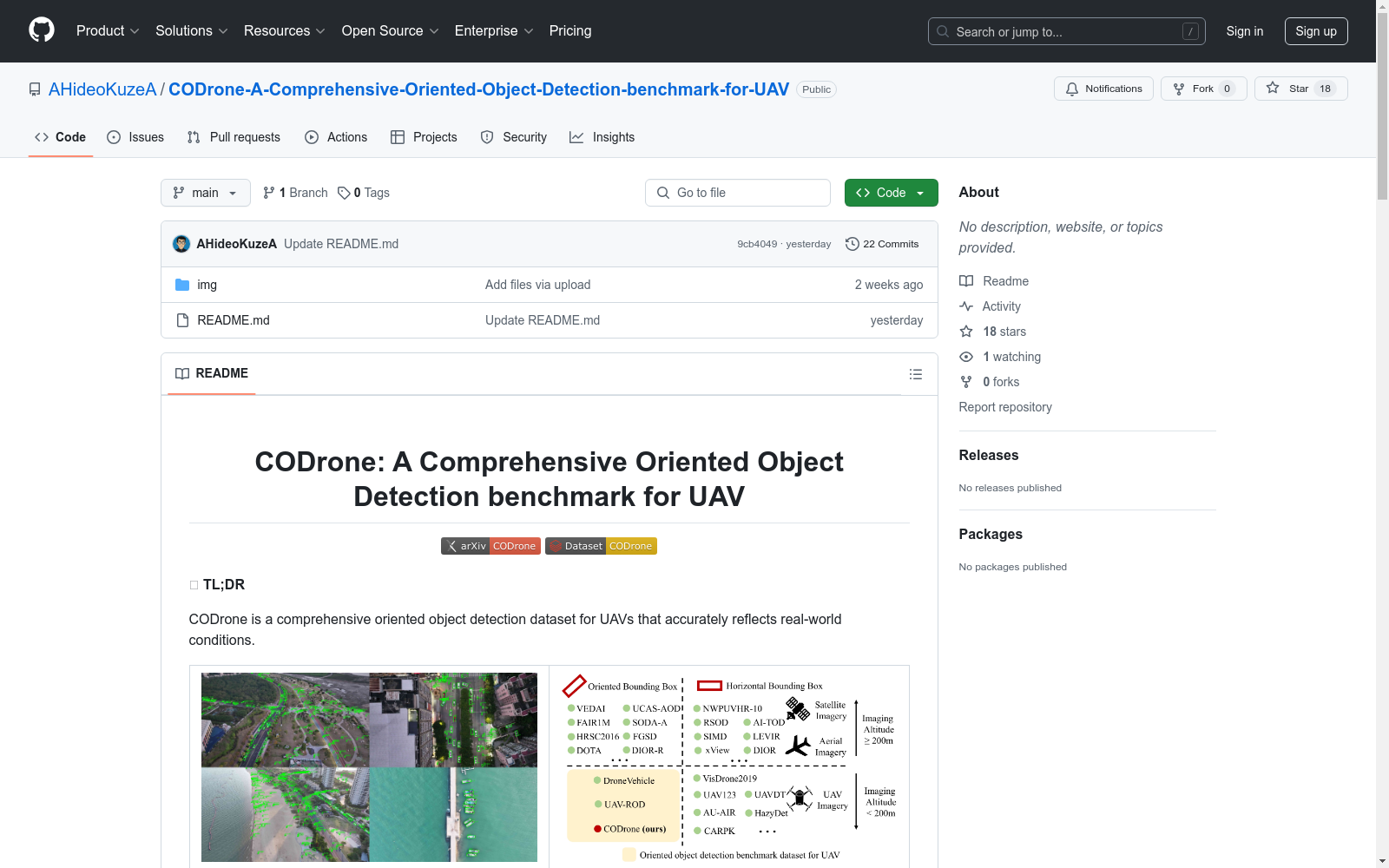
CODrone 是一个为无人机设计的全面定向目标检测数据集,它准确反映了真实世界条件。该数据集包含来自多个城市在不同光照条件下的广泛标注图像,增强了基准的逼真度。CODrone 包含超过 10,000 张高分辨率图像,捕获自五个城市的真实无人机飞行,涵盖了各种城市和工业环境,包括港口和码头。为了提高鲁棒性和泛化能力,它包括在正常光线、低光和夜间条件下相同场景的图像。我们采用了三种飞行高度和两种常用的相机角度,从而产生了六个不同的视角配置。所有图像都针对 12 个常见对象类别进行了定向边界框标注,总计超过 590,000 个标记实例。总体而言,这项工作构建了一个综合数据集和基准,用于城市无人机场景中的定向目标检测,旨在满足该领域的研究和实践应用需求。
CODrone is a comprehensive oriented object detection dataset designed for drones, which accurately reflects real-world conditions. This dataset contains extensively annotated images collected from multiple cities under varying lighting conditions, enhancing the realism of the benchmark. CODrone includes over 10,000 high-resolution images captured during real drone flights across five cities, covering various urban and industrial environments including ports and docks. To improve robustness and generalization capability, it includes images of the same scenes under normal light, low light, and nighttime conditions. We adopted three flight altitudes and two commonly used camera angles, resulting in six distinct viewpoint configurations. All images are annotated with oriented bounding boxes for 12 common object categories, totaling more than 590,000 labeled instances. Overall, this work constructs a comprehensive dataset and benchmark for oriented object detection in urban drone scenarios, aiming to meet the research and practical application needs of this field.
提供机构:
厦门大学人工智能研究所
创建时间:
2025-04-29
原始信息汇总
CODrone数据集概述
数据集基本信息
- 名称: CODrone (Comprehensive Oriented Object Detection benchmark for UAV)
- 类型: 无人机(UAV)定向目标检测数据集
- 规模:
- 图像数量: 10,000张
- 标注对象: 596,700个
- 分辨率: 3840×2160 (4K)
- 标注格式:
- DOTA格式
- VOC格式
- 标注类型: 定向边界框(OBB)
关键特性
- 多样性:
- 12个对象类别
- 多种场景: 城市、乡村、港口、工业区等
- 飞行条件多样性:
- 飞行高度: 30m, 60m, 100m (共70m范围)
- 相机角度: 30°和90°
- 技术特点:
- 高分辨率图像采集
- 精确的定向边界框标注
数据集结构
CODrone/ ├── test/ │ ├── annfile/ # DOTA格式标注 │ ├── images/ │ └── labels/ # VOC格式标注 ├── train/ │ ├── annfile/ │ ├── images/ │ └── labels/ └── val/ ├── annfile/ ├── images/ └── labels/
对比优势
| 特性 | CODrone | 其他数据集(平均) |
|---|---|---|
| 分辨率 | 3840×2160 | 1680×1024 |
| 类别数量 | 12 | 5 |
| 飞行高度范围 | 70m | 44m |
| 相机角度 | 60° | 37.5° |
| OBB支持 | ✅ | 部分支持 |
许可信息
- 许可证: CC BY-NC-SA 4.0
- 使用限制: 仅限学术研究使用
获取方式
- Google Drive: https://drive.google.com/file/d/1vZb8VKNs-bFZNB68ar1WR3wPWyL824Ha/view?usp=sharing
- Quark Drive: https://pan.quark.cn/s/d65dd2124a04
引用格式
bibtex @misc{ye2025clearflexibleprecisecomprehensive, title={More Clear, More Flexible, More Precise: A Comprehensive Oriented Object Detection benchmark for UAV}, author={Kai Ye and Haidi Tang and Bowen Liu and Pingyang Dai and Liujuan Cao and Rongrong Ji}, year={2025}, eprint={2504.20032}, archivePrefix={arXiv}, primaryClass={cs.CV}, url={https://arxiv.org/abs/2504.20032}, }
联系方式
- 邮箱: yekai@stu.xmu.edu.cn
搜集汇总
数据集介绍
构建方式
CODrone数据集通过采用DJI Mavic 3 Pro无人机在多个城市进行实际飞行采集,覆盖了30米、60米和100米三种飞行高度以及30°和90°两种相机倾斜角度,共六种视角组合。数据采集过程中,无人机以10至15米/秒的速度飞行,帧率为60fps,最终从数百个视频片段中筛选出10,004张高质量图像。所有图像均经过人工标注,包含12类常见物体,共计590,000余个标注实例,标注格式采用四角点坐标表示,并标注了类别和难度等级。
特点
CODrone数据集以其高分辨率(3840×2160)、多样化的物体类别(12类)以及灵活的飞行高度和相机角度变化而著称。数据集涵盖了多种光照条件和复杂场景,包括白天、夜晚、城市街道、乡村道路、港口等,增强了数据集的现实性和泛化能力。此外,数据集中每个图像的飞行高度和相机角度信息均被明确标注,便于研究不同飞行姿态下的物体检测性能。
使用方法
CODrone数据集适用于无人机视角下的定向物体检测任务,可用于算法训练、验证和测试。数据集按50%训练集、20%验证集和30%测试集划分,所有测试集标注公开以确保可重复性评估。用户可通过文件名后缀快速筛选特定飞行高度和角度的图像子集,支持针对不同飞行条件的专项研究。此外,数据集的高分辨率特性使其特别适合研究小物体检测和精确边界回归问题。
背景与挑战
背景概述
CODrone数据集由厦门大学多媒体可信感知与高效计算教育部重点实验室的研究团队于2025年提出,旨在解决无人机视角下定向目标检测(OOD)领域的数据缺口问题。该数据集包含来自五个城市、超过10,000张高分辨率(3840×2160)的无人机航拍图像,涵盖12类常见目标,标注实例超过590,000个。区别于现有无人机数据集,CODrone创新性地整合了多高度(30-100米)、多视角(30°/90°相机倾角)和多种光照条件下的数据采集方案,真实模拟了物流巡检、城市管理等实际应用场景中面临的复杂成像条件。作为首个支持多类别OBB标注的无人机基准数据集,其通过精细的几何标注和场景多样性设计,显著提升了算法在真实飞行环境中的泛化能力,推动了无人机视觉感知技术在农业自动化、应急响应等领域的应用发展。
当前挑战
CODrone针对无人机定向目标检测领域存在四大核心挑战:其一,低空动态视角导致的目标外观剧烈变化,现有算法在30°斜视角下的AP75指标较90°俯视角平均下降37.2%;其二,跨高度域适应难题,同一目标在30米与100米高度成像的像素尺寸差异达10倍,造成特征分布偏移;其三,小目标检测瓶颈,数据集中32×32像素以下目标占比41.7%,现有方法对此类目标的漏检率达58.3%;其四,密集场景下的旋转敏感性问题,港口等场景的船舶目标平均交并比误差达15.6度。数据构建过程中,研究团队需攻克高分辨率图像标注一致性(3840×2160下人工标注误差<1.2像素)、多模态数据同步(可见光与红外图像时空对齐精度0.3ms)以及隐私保护(航拍数据匿名化处理)等技术难点。
常用场景
经典使用场景
CODrone数据集在无人机视觉感知领域具有广泛的应用价值,特别是在城市管理、农业自动化、物流监控和紧急响应等场景中。该数据集通过高分辨率图像和多角度拍摄,为研究者提供了丰富的视觉数据,支持复杂环境下的目标检测任务。其多类别标注和灵活的飞行高度设置使其成为评估和开发先进目标检测算法的理想选择。
实际应用
在实际应用中,CODrone数据集被广泛应用于无人机视觉感知系统的开发和优化。例如,在城市交通监控中,该数据集可以帮助识别和跟踪车辆、行人等目标;在农业自动化中,可用于作物监测和病虫害识别;在紧急响应中,支持灾害现场的快速评估和目标定位。其多样化的场景和高质量的标注数据使其成为实际应用中的宝贵资源。
衍生相关工作
CODrone数据集推动了多个相关领域的研究进展,特别是在无人机目标检测和遥感图像分析方面。基于该数据集,研究者开发了多种先进的检测算法,如Rotated Faster R-CNN、Rotated RetinaNet和RoI Transformer等。这些算法在CODrone数据集上的表现被广泛评估,进一步推动了无人机视觉感知技术的发展。此外,该数据集还为多模态融合、小目标检测和动态场景分析等研究方向提供了新的数据支持。
以上内容由遇见数据集搜集并总结生成


