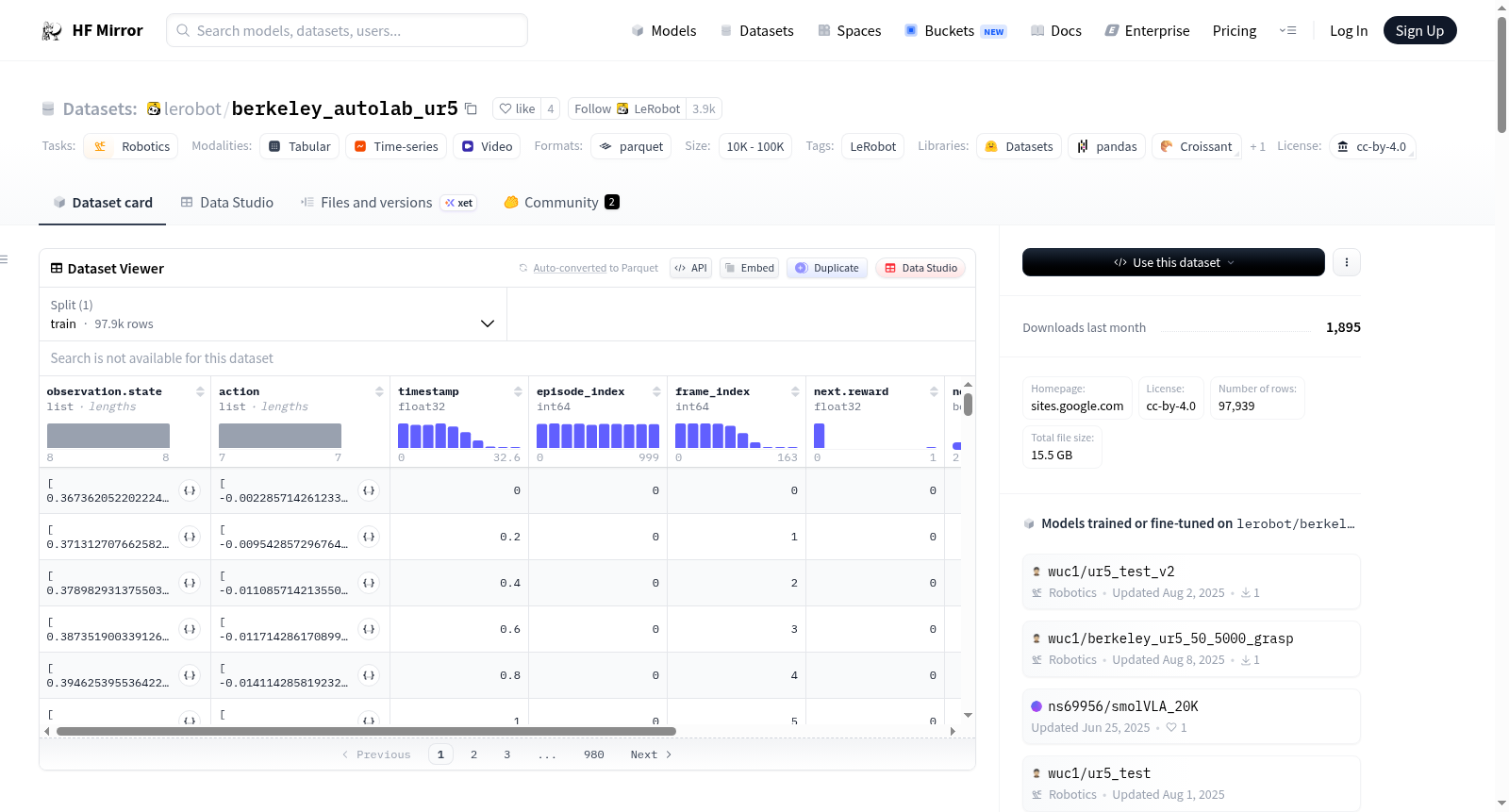
lerobot/berkeley_autolab_ur5
收藏Hugging Face2025-02-20 更新2025-04-08 收录
下载链接:
https://hf-mirror.com/datasets/lerobot/berkeley_autolab_ur5
下载链接
链接失效反馈官方服务:
资源简介:
Berkeley UR5演示数据集是一个机器人学任务的数据集,包含了1000个episodes,97939帧,5个tasks,3000个videos,以及1个chunk。数据集提供了多种features,包括视频信息、语言指令、状态、动作等,适用于机器人学相关的研究和应用。
The Berkeley UR5 Demonstration Dataset is a robotics task dataset containing 1000 episodes, 97939 frames, 5 tasks, 3000 videos, and 1 chunk. The dataset provides various features including video information, language instructions, states, actions, etc., suitable for robotics research and applications.
提供机构:
lerobot
搜集汇总
数据集介绍
背景与挑战
背景概述
berkeley_autolab_ur5是一个机器人领域的数据集,包含97,939行数据,总大小为15.5GB,数据格式为parquet,包含多种模态如表格数据、时间序列和视频。数据集包含1000个episodes,5个任务,3000个视频,帧率为5fps,并包含多种特征如观测状态、动作、时间戳、奖励等。
以上内容由遇见数据集搜集并总结生成


