Driving-Scaling-Law Dataset
收藏github2024-12-10 更新2024-12-11 收录
下载链接:
https://github.com/ucaszyp/Driving-Scaling-Law
下载链接
链接失效反馈官方服务:
资源简介:
该数据集是一个大规模、多样化的真实世界数据集,用于研究端到端自动驾驶的数据扩展规律。数据集涵盖了各种天气条件、道路类型和交通场景,包括23种不同的场景类型,总计超过30,000小时的驾驶演示。
This dataset is a large-scale, diverse real-world dataset designed for researching data scaling laws in end-to-end autonomous driving. It covers various weather conditions, road types and traffic scenarios, including 23 distinct scenario types, with a total of over 30,000 hours of driving demonstrations.
创建时间:
2024-12-03
原始信息汇总
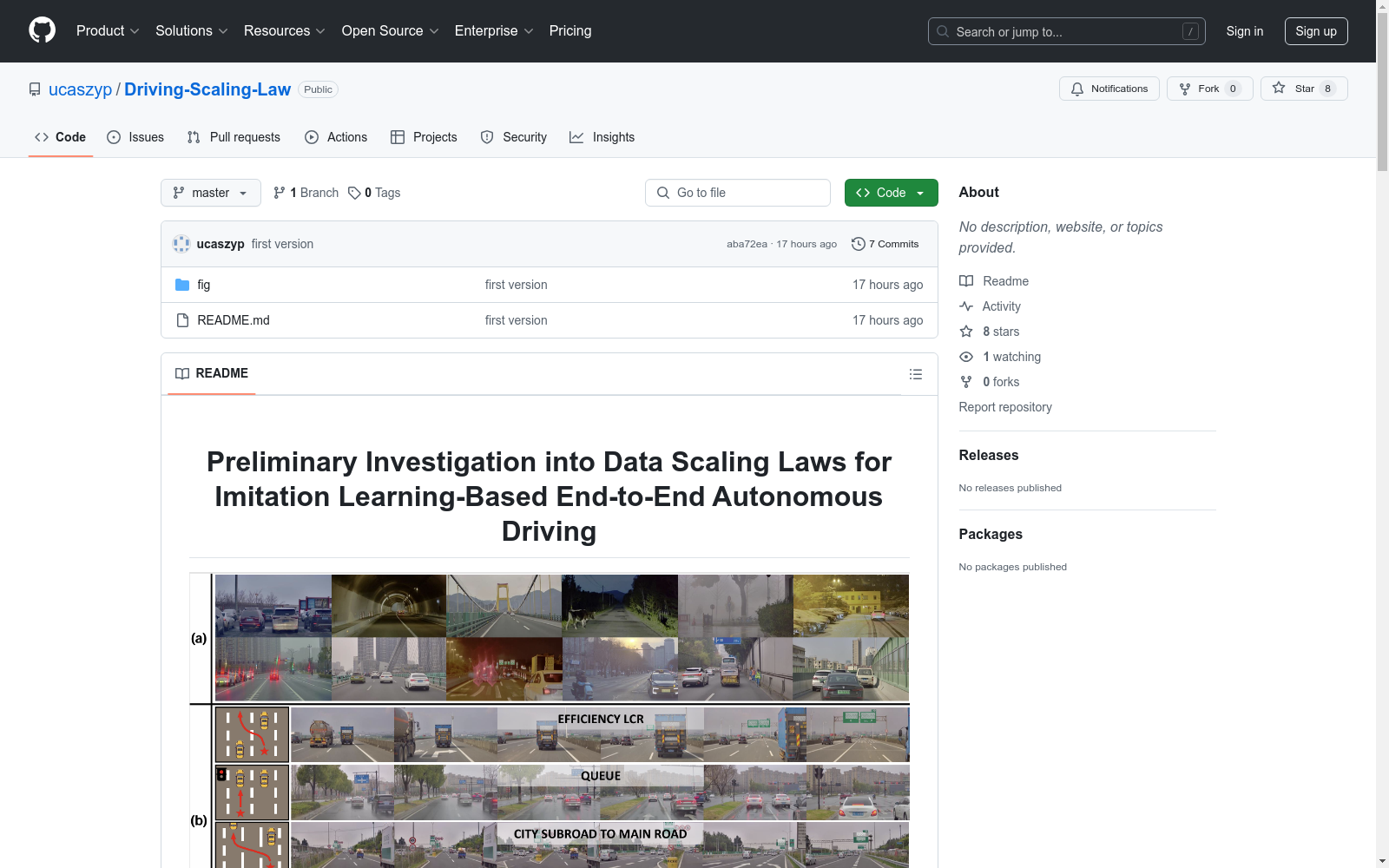
Preliminary Investigation into Data Scaling Laws for Imitation Learning-Based End-to-End Autonomous Driving
数据集概述
我们收集并利用了一个大规模、多样化的真实世界数据集,用于研究端到端驾驶的数据扩展规律。该数据集涵盖了各种天气条件、道路类型和交通场景,展示了23种不同的场景类型,并进行了深入分析,以探讨数据规模对泛化能力的影响以及数据分布的重要性。
数据集特点
- 多样性:数据集包含多种天气条件、道路类型和交通场景。
- 场景类型:识别并分析了23种不同的场景类型。
- 轨迹分布:与现有的nuScenes和nuPlan数据集相比,我们的轨迹分布更加多样化,包括更高比例的高速驾驶、转弯和变道。
数据规模
- 数据量:收集了约400万次演示,涵盖23种不同的场景类型,总计超过30,000小时的驾驶演示。
- 评估:进行了1,400次多样化的驾驶演示评估(1,300次开环评估和100次闭环模拟评估)。
实验结果
- 性能关系:驾驶模型的性能与训练数据量呈幂律关系。
- 长尾数据:少量增加长尾数据量可以显著提高相应场景的性能。
- 组合泛化:适当的数据扩展可以使模型在新场景和动作中实现组合泛化。
模拟演示
- 无效变道:展示了无效变道场景的比较。
- 等待转弯:展示了等待转弯场景的比较。
- 多样化环境模拟:展示了多样化环境下的模拟演示。
实际部署
- 真实世界部署:展示了在真实世界中的部署演示。
搜集汇总
数据集介绍
构建方式
在构建Driving-Scaling-Law Dataset时,研究团队精心收集并整合了大规模、多样化的真实世界驾驶数据,涵盖了多种天气条件、道路类型和交通场景。通过识别并分类23种不同的驾驶情境,团队系统性地分析了数据规模对模型泛化能力的影响,并特别关注了数据分布的重要性。此外,该数据集包含了约400万次驾驶演示,累计时长超过30,000小时,确保了数据在数量和多样性上的充足性。
使用方法
使用Driving-Scaling-Law Dataset时,研究者可以利用其丰富的驾驶场景和行为数据,进行模仿学习为基础的端到端自动驾驶模型的训练与评估。通过分析数据规模对模型泛化能力的影响,研究者能够深入理解数据扩展在提升模型性能中的关键作用。此外,数据集提供了开放和闭环模拟评估的详细结果,为研究者提供了在不同驾驶场景下模型表现的直观对比,有助于优化模型在实际部署中的安全性。
背景与挑战
背景概述
随着端到端自动驾驶技术的快速发展,模仿学习在自动驾驶领域中的应用逐渐受到广泛关注。然而,现有方法在处理真实世界数据时,往往受限于数据规模的不足,难以全面探索数据规模对自动驾驶模型性能的影响。为此,Driving-Scaling-Law Dataset应运而生,由主要研究人员或机构收集并构建,旨在通过大规模、多样化的真实世界数据集,深入研究数据规模对端到端自动驾驶模型的影响。该数据集包含了约400万次来自23种不同驾驶场景的演示,总计超过3万小时的驾驶数据,涵盖了多种天气条件、道路类型和交通场景,为研究数据规模与模型泛化能力之间的关系提供了坚实的基础。
当前挑战
Driving-Scaling-Law Dataset在构建过程中面临了多重挑战。首先,数据集的多样性要求在收集过程中涵盖广泛的驾驶场景和行为,这不仅增加了数据采集的复杂性,还对数据标注和分类提出了更高的要求。其次,如何确保数据集在不同场景下的代表性和均衡性,以避免模型在特定场景下的过拟合或欠拟合,是另一个重要挑战。此外,数据规模的增加也带来了存储和计算资源的巨大压力,如何在有限的资源下高效地处理和分析大规模数据,是该数据集面临的又一难题。最后,如何在实际部署中验证模型的泛化能力,确保其在真实世界中的安全性和可靠性,也是该数据集需要解决的关键问题。
常用场景
经典使用场景
Driving-Scaling-Law Dataset 的经典使用场景主要集中在探索端到端自动驾驶模型的数据规模效应。该数据集通过收集超过400万次、涵盖23种不同驾驶场景的演示数据,为研究数据规模对模型泛化能力的影响提供了丰富的资源。研究者可以利用该数据集进行开放环路和闭合环路的模拟评估,分析数据规模与模型性能之间的幂律关系,从而优化自动驾驶系统的训练策略。
解决学术问题
Driving-Scaling-Law Dataset 解决了端到端自动驾驶领域中数据规模对模型泛化能力影响的关键学术问题。通过大规模、多样化的数据集,研究者能够深入探讨数据规模与模型性能之间的幂律关系,揭示长尾数据对特定场景性能提升的重要性,以及数据规模对模型在新型场景和动作中组合泛化能力的提升。这些发现对于提升自动驾驶系统的安全性和可靠性具有重要意义。
实际应用
在实际应用中,Driving-Scaling-Law Dataset 为自动驾驶系统的开发和部署提供了关键支持。通过分析数据规模对模型性能的影响,开发者可以优化数据收集策略,确保模型在不同驾驶场景下的稳定性和安全性。此外,该数据集还支持在真实世界中的部署测试,帮助验证模型在复杂环境中的表现,从而加速自动驾驶技术的商业化进程。
数据集最近研究
最新研究方向
在自动驾驶领域,基于模仿学习的端到端自动驾驶模型因其可扩展性而备受关注。然而,现有方法受限于真实世界数据的规模,难以全面探索数据规模对模型性能的影响。Driving-Scaling-Law Dataset通过收集多样化的驾驶场景数据,深入研究了数据规模对模型泛化能力的影响。研究表明,模型性能与训练数据量呈幂律关系,且少量长尾数据的增加能显著提升特定场景的性能。此外,数据规模的适当扩展使模型在面对新颖场景和动作时展现出组合泛化能力,为自动驾驶模型在实际环境中的安全部署提供了重要支持。
以上内容由遇见数据集搜集并总结生成


