杂乱场景抓取数据集
收藏中国科学院脑科学数据中心2023-12-04 更新2024-03-05 收录
下载链接:
https://www.braindatacenter.cn/datacenter/web/#/dataSet/details?id=1731563997230522369
下载链接
链接失效反馈官方服务:
资源简介:
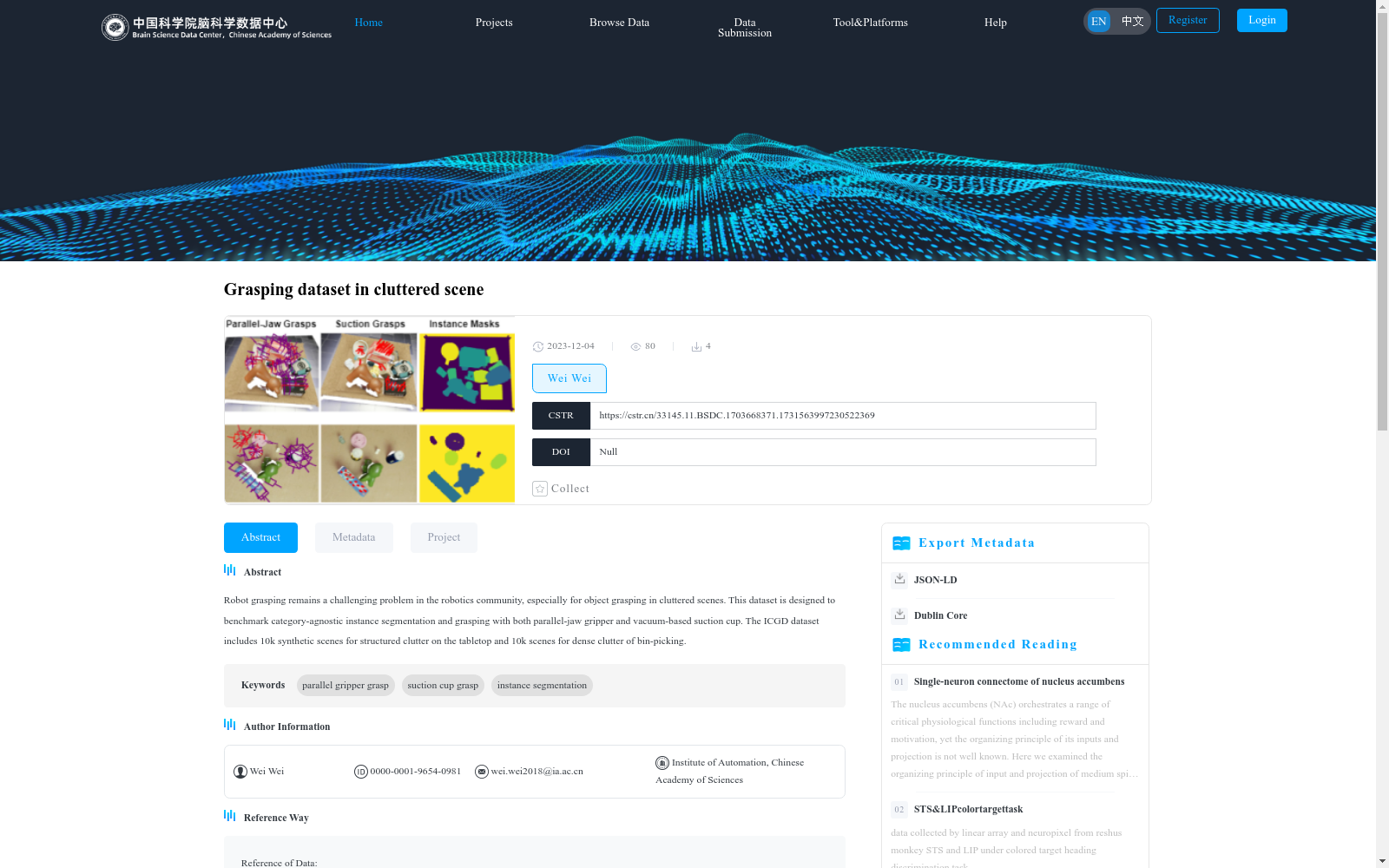
机器人抓取仍然是机器人界的一个难题,尤其是在杂乱场景中抓取物体。本数据集旨在为分类无关的实例分割以及使用平行爪式抓手和真空吸盘进行抓取提供基线测试。ICGD 数据集包括 10k 个桌面上结构性杂乱的合成场景和 10k 个密集杂乱的分拣场景。
Robot grasping remains a challenging problem in the robotics community, especially when grasping objects in cluttered scenes. This dataset aims to provide baseline testing for category-agnostic instance segmentation and robotic grasping using parallel-jaw grippers and vacuum suction cups. The ICGD dataset includes 10,000 structurally cluttered synthetic scenes on tabletops and 10,000 densely cluttered bin-picking scenes.
提供机构:
中国科学院脑科学数据中心
创建时间:
2023-12-04
搜集汇总
数据集介绍
背景与挑战
背景概述
该数据集是一个用于机器人抓取研究的基准数据集,专注于杂乱场景中的物体抓取任务。它包含20k个合成场景,分为桌面结构化杂乱和密集装箱杂乱两种类型,支持平行夹爪和真空吸盘两种抓取工具的评估,旨在推动类别无关的实例分割和抓取算法的发展。数据集由中国科学院自动化研究所发布,存储容量为8.57 GB,适用于机器人视觉和抓取控制领域的研究。
以上内容由遇见数据集搜集并总结生成


