MUNO21
收藏arXiv2021-10-10 更新2024-06-21 收录
下载链接:
https://favyen.com/muno21/
下载链接
链接失效反馈官方服务:
资源简介:
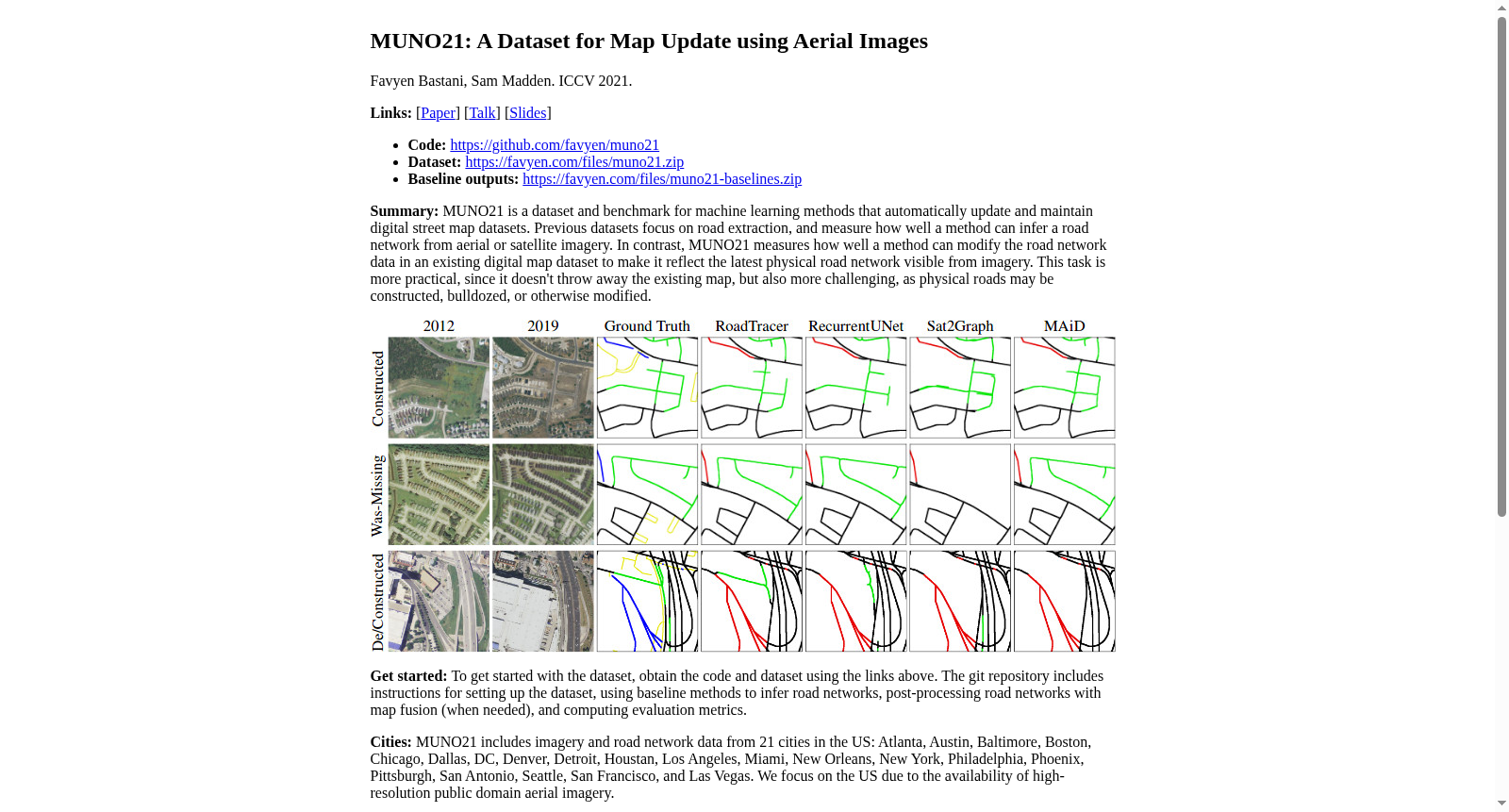
MUNO21数据集是由麻省理工学院计算机科学与人工智能实验室开发的,用于地图更新任务的全面数据集。该数据集覆盖了美国21个城市,总面积超过6000平方公里,包含了2012年至2019年间的NAIP航空影像和OpenStreetMap数据。MUNO21数据集的核心是514个地图更新场景,这些场景记录了在这八年间道路网络的重大变化。数据集不仅用于研究道路提取,更专注于实际的地图更新任务,如道路的添加、删除和移动,同时保持现有地图的准确性。MUNO21数据集的应用领域包括自动地图更新,旨在解决现有地图与实际道路网络不符的问题,提高地图的实时性和准确性。
The MUNO21 dataset is a comprehensive dataset developed by the Computer Science and Artificial Intelligence Laboratory (CSAIL) of the Massachusetts Institute of Technology (MIT) for map update tasks. Spanning 21 cities across the United States with a total area of over 6,000 square kilometers, it contains NAIP aerial imagery and OpenStreetMap data collected between 2012 and 2019. The core of the MUNO21 dataset comprises 514 map update scenarios that document major changes to road networks over this 8-year period. Beyond research on road extraction, the dataset focuses on practical map update tasks such as road addition, deletion, and relocation, while maintaining the accuracy of existing maps. The application scope of the MUNO21 dataset includes automated map update, which aims to resolve the discrepancies between existing maps and real-world road networks and improve the timeliness and accuracy of maps.
提供机构:
麻省理工学院计算机科学与人工智能实验室
创建时间:
2021-10-10
搜集汇总
数据集介绍
构建方式
MUNO21数据集聚焦于地图更新任务,而非传统的道路提取。其构建基于美国21个城市共6000余平方公里的区域,利用NAIP航空影像(2012-2019年间每两年一期)与OpenStreetMap历史数据。研究者通过半自动化流程识别地图中发生显著变化的区域:首先自动比较逐年OSM数据以生成候选变化,随后人工筛选出514个真实地图更新场景(涵盖道路新增、缺失、拆除及错误更正),并补充780个无变化场景。每个场景包含变化前后的地图、对应时间序列影像及人工标注的变化类型与施工年份。
特点
该数据集的核心特色在于其面向实际地图更新挑战的设计。与仅关注道路提取的现有数据集不同,MUNO21包含了时间序列影像与地图的配对,能够捕捉道路网络的物理演变与地图版本差异。514个更新场景覆盖了五种典型情境:新建道路、地图遗漏、道路拆除、错误道路以及拓扑结构变更,并提供了施工年份的精细标注。此外,数据集还包含无变化场景以评估方法的精确率,并区分了公共道路与模糊道路(如停车场、人行道),从而更贴近真实应用中的复杂需求。
使用方法
使用MUNO21时,方法需输入变化前的道路网络与时间序列航空影像,输出更新后的网络。评估采用精确率-召回率曲线,其中精确率基于无变化场景中方法未引入任何错误的比例,召回率则通过改进分数衡量输出地图相较于原始地图的进步程度(借助APLS或PixelF1指标)。数据集的训练集包含10个城市和326个标注场景,可用于训练分类模型以识别错误道路、过滤虚假推断或聚焦于物理施工导致的变化。测试集含11个城市和568个场景,用于全面评估方法的泛化能力。
背景与挑战
背景概述
随着卫星与航空影像数据的日益丰富,自动从影像中更新街道地图的研究引起了广泛关注。然而,现有研究多集中于从零开始推断道路网络的道路提取任务,忽视了现实中已有相对高质量地图的普遍情况。为此,麻省理工学院计算机科学与人工智能实验室的Favyen Bastani与Sam Madden于2020年提出了MUNO21数据集,旨在推动从道路提取向更实际的地图更新任务转型。该数据集覆盖美国21个城市、总面积超过6000平方公里,融合了2012至2019年间四个时间节点的NAIP航空影像与OpenStreetMap历史数据,包含514个真实地图更新场景及780个无变化场景,为评估地图更新方法提供了大规模、多维度的基准。MUNO21的提出不仅填补了地图更新领域缺乏标准化数据集的空白,也促使研究者重新审视道路推断方法的实际应用价值。
当前挑战
MUNO21数据集所应对的核心挑战在于地图更新任务本身的复杂性,这超越了传统道路提取的范畴。具体而言,地图更新需要处理多种动态场景:新增道路(如新修建的公路)、缺失道路(地图中遗漏但影像可见的道路)、删除道路(物理上已拆除或从未存在的道路)以及拓扑结构变化(如交叉口改建为环岛)。此外,构建过程中面临的技术挑战包括:如何从多时相影像中准确识别物理变化与地图编辑的对应关系,如何避免对未变化区域的误操作,以及如何设计评价指标以兼顾精度与召回率。实验表明,即便最先进的方法在30%召回率下精度仅为95%,远未达到实际部署所需的99%以上精度,凸显了地图更新任务在鲁棒性与准确性上的巨大提升空间。
常用场景
经典使用场景
MUNO21数据集的核心经典使用场景是地图更新任务,即利用航空影像时间序列对现有地图进行增量式修正。与传统的道路提取不同,该场景要求模型在保留已有正确道路信息的基础上,精准识别并添加新修建的道路、移除已废弃或错误记录的道路,以及调整因拓扑变化(如交叉口改建为环岛)而变动的路段。数据集涵盖21个美国城市的514个真实地图更新案例,每个案例均提供更新前地图、多时相航空影像和更新后地面真值,为评估算法在复杂现实环境中的鲁棒性提供了标准化基准。
实际应用
在实际应用中,MUNO21支撑的自动地图更新技术可大幅降低地图维护的人力与资金成本。例如,OpenStreetMap等众包平台每年需投入数亿美元人工校验道路变更,而基于该数据集训练的方法能自动检测新建住宅区道路、识别因自然灾害损毁的路段,并纠正长期存在的错误标注。在导航服务领域,该技术可实现地图的周级甚至日级更新频率,避免因道路信息滞后导致的路线规划失误。此外,自动驾驶高精地图的持续维护、智慧城市交通基础设施的数字化管理,均能从中受益。
衍生相关工作
MUNO21衍生了一系列推动地图更新技术发展的经典工作。例如,RoadTracer结合地图融合后处理算法,通过迭代搜索提取新增道路并自动连接至现有网络;MAiD方法则扩展了点对点搜索技术,专门处理地图中缺失路段的补全。后续研究进一步引入循环卷积神经网络(RecurrentCNN)进行路段分类,实现了对错误道路的精准剔除(如Remove-Incorrect模块)以及基于时序影像的施工事件检测(Focus-Constructed方法)。这些工作共同构建了从道路提取向地图更新过渡的技术路线,其评估协议(如APLS改进率指标)已成为该领域的标准评价范式。
以上内容由遇见数据集搜集并总结生成


