Helvipad
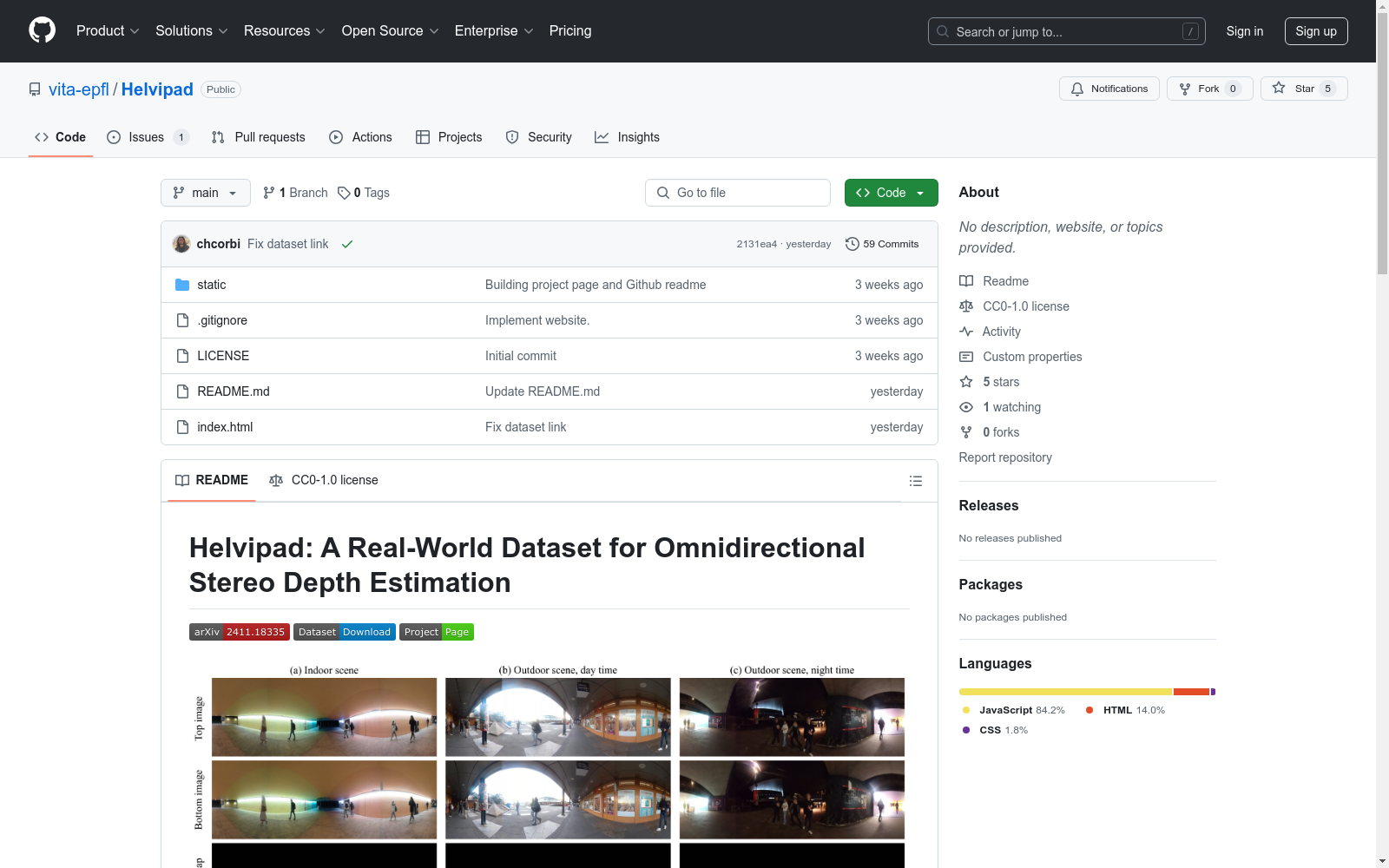
收藏Helvipad: A Real-World Dataset for Omnidirectional Stereo Depth Estimation
摘要
Helvipad是一个用于全方位立体深度估计的真实世界数据集,包含来自不同环境(包括拥挤的室内和室外场景)的40K帧视频序列,具有多样的光照条件。数据集使用两个360°摄像头(上下设置)和一个LiDAR传感器采集,包含通过将3D点云投影到等距图像上生成的精确深度和视差标签。此外,还提供了通过深度补全增强的训练集,显著增加了标签密度。
数据集结构
数据集分为训练和测试子集,结构如下:
helvipad/ ├── train/ │ ├── depth_maps # 从LiDAR数据生成的深度图 │ ├── depth_maps_augmented # 使用深度补全增强的深度图 │ ├── disparity_maps # 从深度图计算的视差图 │ ├── disparity_maps_augmented # 使用深度补全增强的视差图 │ ├── images_top # 顶部摄像头的RGB图像 │ ├── images_bottom # 底部摄像头的RGB图像 │ ├── LiDAR_pcd # 原始LiDAR点云数据 ├── test/ │ ├── depth_maps # 从LiDAR数据生成的深度图 │ ├── disparity_maps # 从深度图计算的视差图 │ ├── images_top # 顶部摄像头的RGB图像 │ ├── images_bottom # 底部摄像头的RGB图像 │ ├── LiDAR_pcd # 原始LiDAR点云数据
基准测试
评估了多种最先进的立体匹配方法在标准和360°图像上的性能。所有模型均在单个NVIDIA A100 GPU上训练,使用尽可能大的批量大小以确保计算资源的可比性。
| 方法 | 类型 | 视差MAE (°) | 视差RMSE (°) | 视差MARE | 深度MAE (m) | 深度RMSE (m) | 深度MARE |
|---|---|---|---|---|---|---|---|
| PSMNet | 立体 | 0.33 | 0.54 | 0.20 | 2.79 | 6.17 | 0.29 |
| 360SD-Net | 360° 立体 | 0.21 | 0.42 | 0.18 | 2.14 | 5.12 | 0.15 |
| IGEV-Stereo | 立体 | 0.22 | 0.41 | 0.17 | 1.85 | 4.44 | 0.15 |
| 360-IGEV-Stereo | 360° 立体 | 0.18 | 0.39 | 0.15 | 1.77 | 4.36 | 0.14 |
下载
数据集可在HuggingFace Hub下载。
引用
如果使用Helvipad数据集进行研究,请引用以下论文: bibtex @misc{zayene2024helvipad, author = {Zayene, Mehdi and Endres, Jannik and Havolli, Albias and Corbière, Charles and Cherkaoui, Salim and Ben Ahmed Kontouli, Alexandre and Alahi, Alexandre}, title = {Helvipad: A Real-World Dataset for Omnidirectional Stereo Depth Estimation}, year = {2024}, eprint = {2403.16999}, archivePrefix = {arXiv}, primaryClass = {cs.CV} }
许可证
该数据集基于Creative Commons Attribution-ShareAlike 4.0 International License许可。