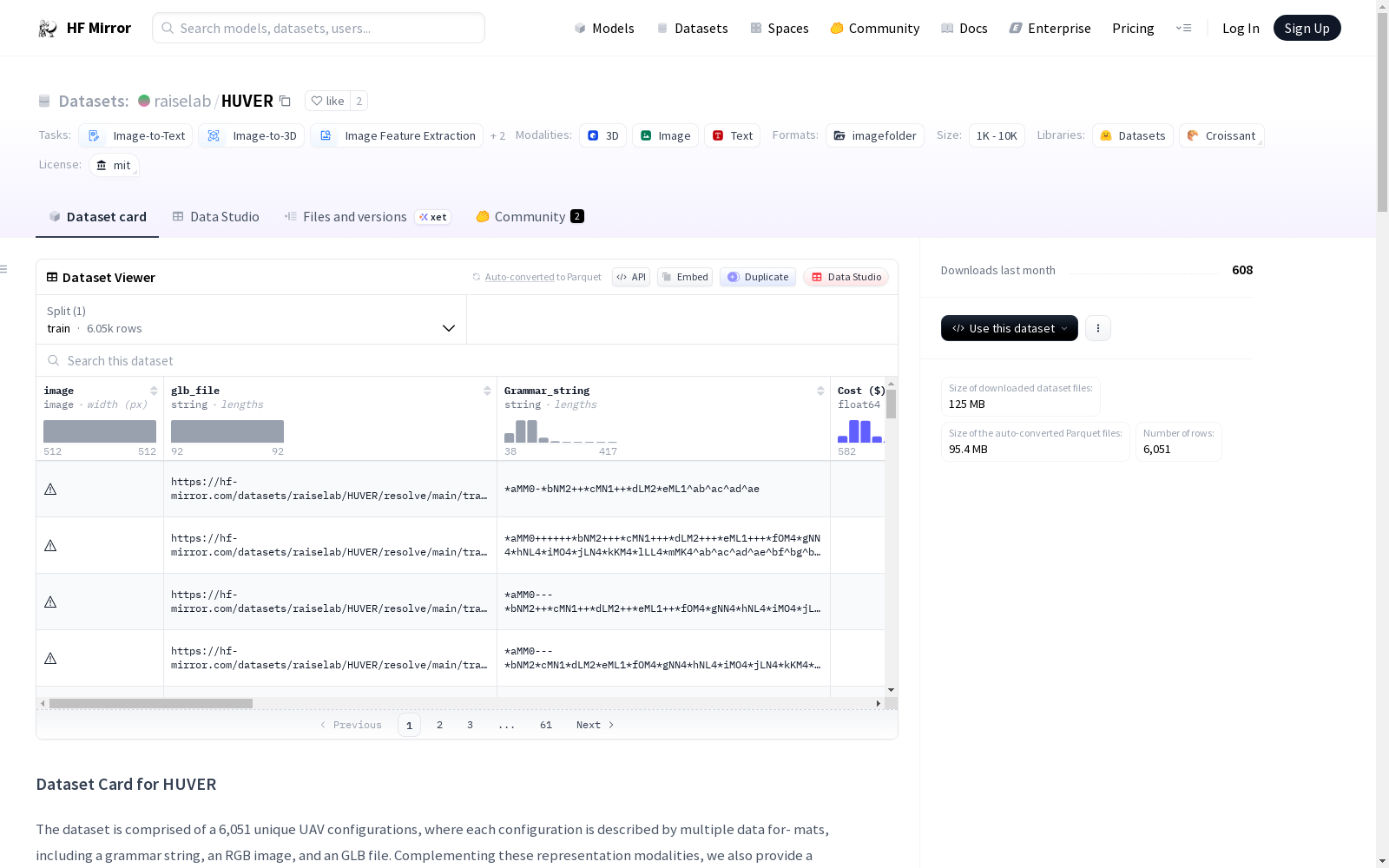
raiselab/HUVER
收藏数据集概述
基本信息
- 数据集名称: HUVER
- 数据集大小: 6,051个独特的无人机配置
- 数据格式: 语法字符串、RGB图像、GLB文件
- 语言: 英语
- 许可证: MIT
- 创建者: Abhiram Karri, Gary Stump, Christopher McComb, Binyang Song
数据集来源
- 仓库: HUVER
- 论文: HUVER: The HyForm Uncrewed Vehicle Engineering Repository, ASME JMD (under review)
数据集用途
直接用途
- 支持多种无人机表示的开发,包括3D模型、语法表示、文本描述和参数数据。
- 支持通过各种生成模型创建多样化的无人机设计。
超出范围的用途
- 不适合用于飞行就绪系统的详细设计。
数据集结构
数据实例
json { Image: <0001.png>, glb_file: https://huggingface.co/datasets/raiselab/HUVER/resolve/main/train/glb/0001.glb?download=true, Grammar_string": <*aMM0-*bNM2++*cMN1++dLM2eML1^ab^ac^ad^ae>, Cost ($): <1877.19>, Number of Batteries: <1>, Number of Motor-Rotor Pairs: <4>, Number of Airfoils: <0>, Number of Connectors: <4>, Weight of Batteries (lb): <19.40347644>, Weight of Motor-Rotor Pair (lb): <3.858051314>, Weight of Airfoils (lb): <0.0>, Total Weight (lb): <23.26152854>, Total Thrust (lb): <82.50002518>, Normalized Average Structure Size: <0.324324324>, Normalized Average Motor Size: <0.259259259>, Normalized Average Foil Size: <0.0>, Design Descriptor: <This drone is made up of 1 part and has 4 engines that help it move. It also has 0 wings for better flying. It has 4 links that connect everything together securely. The drone weighs 23.2615285432816 pounds in total and can lift itself and more, thanks to its strong thrust of 82.500025177002 pounds.>, Operations Descriptor: <This drone configuration has a feasible flying range of 0.0-0.0 miles, evaluated over the payload range of 0-0 pounds. This configuration has a velocity range of 0.06352621-0.06352621 mph. It is observed when payload increases, the flying range and velocity decrease. The drones achieve highest values of velocity and range for the lowest payloads. It can be interpreted from the data that the drone can fly as far as 0.0 miles, and can reach maximum speeds up to 0.06352621 mph. This means that while the drone does well in many situations, how far and fast it can fly can vary with how much payload it carries. This drone costs around $1877.19, adding up costs of all the components used to achieve this configuration.>, Performance: <Feasibilty": "CouldNotStabilize", "Flying Range": 0.0, "Payload Capacity (lb)": 0, "Velocity (mph)": 0.06352621, "Performance Descriptor": "This drone could not hover. The drone for a payload of 0 pounds, could not accomplish a successful run, the reason being either the motors could not provide enough lift or the drone did not balance properly after flight".> }
数据字段
- Grammar String: 每个无人机配置由一个语法字符串完全描述,该字符串根据预定义的语法规则结构化。
- Image: 对应于无人机配置的RGB图像的俯视图。
- glb: 对应无人机配置的详细空间结构的3D网格表示。
- 配置参数字段: 包括电池数量、电机-旋翼对数量、翼片数量、连接器数量、电池重量、电机-旋翼对重量、翼片重量、总重量、总推力、归一化平均结构尺寸、归一化平均电机尺寸、归一化平均翼片尺寸。
- 文本描述:
- Design Descriptor: 基于无人机配置的设计描述。
- Performance Descriptor: 基于模拟结果的无人机性能描述。
- Operational Descriptor: 基于操作范围的无人机性能曲线描述。
数据集创建
数据收集和处理
- 数据收集和处理: 更多信息待补充。
- 数据来源: 更多信息待补充。
偏差、风险和限制
- 偏差、风险和限制: 更多信息待补充。
- 建议: 用户应了解数据集的风险、偏差和技术限制。
数据集联系