OpenUAV
收藏arXiv2024-10-10 更新2024-10-11 收录
下载链接:
https://prince687028.github.io/OpenUAV
下载链接
链接失效反馈官方服务:
资源简介:
OpenUAV数据集是由北京航空航天大学人工智能研究所创建的,专门用于无人机视觉语言导航任务。该数据集包含约12,000条轨迹,涵盖了6自由度的飞行动态,准确捕捉了无人机的复杂飞行行为。数据集的创建过程包括在OpenUAV平台上进行连续飞行,并使用GPT-4生成目标描述,随后进行人工质量检查。该数据集主要应用于无人机在复杂环境中的导航任务,旨在提高无人机在现实世界中的导航精度和效率。
The OpenUAV dataset was developed by the Institute of Artificial Intelligence at Beihang University, specifically tailored for unmanned aerial vehicle (UAV) vision-language navigation tasks. This dataset contains approximately 12,000 trajectories, covering 6-degree-of-freedom flight dynamics, and accurately captures the complex flight behaviors of UAVs. The development process of the dataset involves conducting continuous flight experiments on the OpenUAV platform, generating target descriptions with GPT-4, followed by manual quality inspection. It is mainly applied to UAV navigation tasks in complex environments, with the goal of enhancing the navigation accuracy and efficiency of UAVs in real-world scenarios.
提供机构:
北京航空航天大学人工智能研究所
创建时间:
2024-10-10
搜集汇总
数据集介绍
构建方式
OpenUAV数据集的构建基于一个高度仿真的无人机视觉语言导航(VLN)平台,该平台集成了多样化的环境、真实的飞行控制和广泛的算法支持。通过在OpenUAV平台上进行约12,000次轨迹的收集,构建了一个面向目标的VLN数据集。这些轨迹由人类标注者在平台上进行连续飞行,定期记录无人机状态,并异步收集传感器数据,以获取导航轨迹。利用GPT-4生成目标描述,并进行人工质量检查,最终形成了高质量的导航指令,共计约12,000对轨迹-指令对。
特点
OpenUAV数据集的显著特点在于其真实性和复杂性。该数据集首次包含了6自由度(DoF)的运动轨迹,准确捕捉了无人机的复杂飞行动力学。此外,数据集中的环境多样且复杂,涵盖了城市、乡村和自然景观等多种场景,确保了任务的挑战性和复杂性。数据集还提供了详细的导航指令和环境信息,增强了无人机的导航能力。
使用方法
OpenUAV数据集适用于研究无人机视觉语言导航(VLN)任务,特别是在复杂和真实环境中的应用。研究者可以利用该数据集训练和评估无人机导航模型,探索如何在多模态信息(如视觉和文本)的指导下实现精确导航。数据集的多样性和真实性使其成为开发和验证新型导航算法的重要资源,有助于推动无人机VLN系统向实际应用的转化。
背景与挑战
背景概述
视觉-语言导航(VLN)作为人工智能领域的一个长期目标,旨在构建能够理解人类指令并据此导航的具身代理。近年来,VLN研究主要集中在地面代理上,而基于无人机的VLN(UAV-VLN)则相对较少受到关注。尽管UAV-VLN具有丰富的应用场景,但由于无人机与地面代理在动作空间和观察上的显著差异,这一领域仍具有巨大的研究价值。OpenUAV数据集由北京航空航天大学和香港中文大学的研究人员于2024年创建,旨在解决无人机在复杂空中环境中进行视觉-语言导航的挑战。该数据集通过引入真实飞行控制和多样化算法支持,构建了首个专门为无人机VLN任务设计的目标导向VLN数据集,包含约12,000条轨迹,为无人机在真实环境中的导航提供了重要资源。
当前挑战
OpenUAV数据集面临的挑战主要集中在两个方面:一是无人机运动动力学的不匹配,无人机在三维空间中的自由运动使其轨迹难以分解为离散动作,传统的固定动作集方法无法捕捉真实的飞行动力学;二是导航任务的复杂性,无人机在多样化的户外开放环境中操作,导航路径通常较长且复杂,仅依赖目标描述不足以在复杂动态场景中进行精确的定位和导航。此外,数据集构建过程中遇到的挑战包括如何收集高质量的导航指令和真实飞行轨迹,以及如何处理传感器数据以确保数据的连续性和准确性。这些挑战共同构成了OpenUAV数据集在推动无人机视觉-语言导航研究中的关键障碍。
常用场景
经典使用场景
OpenUAV数据集在无人机视觉语言导航(VLN)任务中展现了其经典应用场景。该数据集通过模拟真实环境中的飞行控制和多样化的算法支持,为无人机在复杂环境中的导航提供了丰富的训练数据。其核心应用在于通过语言指令和视觉信息引导无人机到达目标位置,特别是在需要连续轨迹生成和复杂场景理解的情境下,OpenUAV数据集为研究者提供了一个高度仿真的实验平台。
衍生相关工作
OpenUAV数据集的发布催生了一系列相关研究工作。研究者们基于该数据集开发了多种无人机导航模型,如结合多模态理解能力的LLM模型,显著提升了无人机在复杂环境中的导航性能。此外,OpenUAV平台还激发了对无人机自主导航能力的深入研究,推动了从模拟环境到真实世界部署的技术转移。这些衍生工作不仅扩展了无人机VLN的研究边界,也为无人机技术的广泛应用奠定了基础。
数据集最近研究
最新研究方向
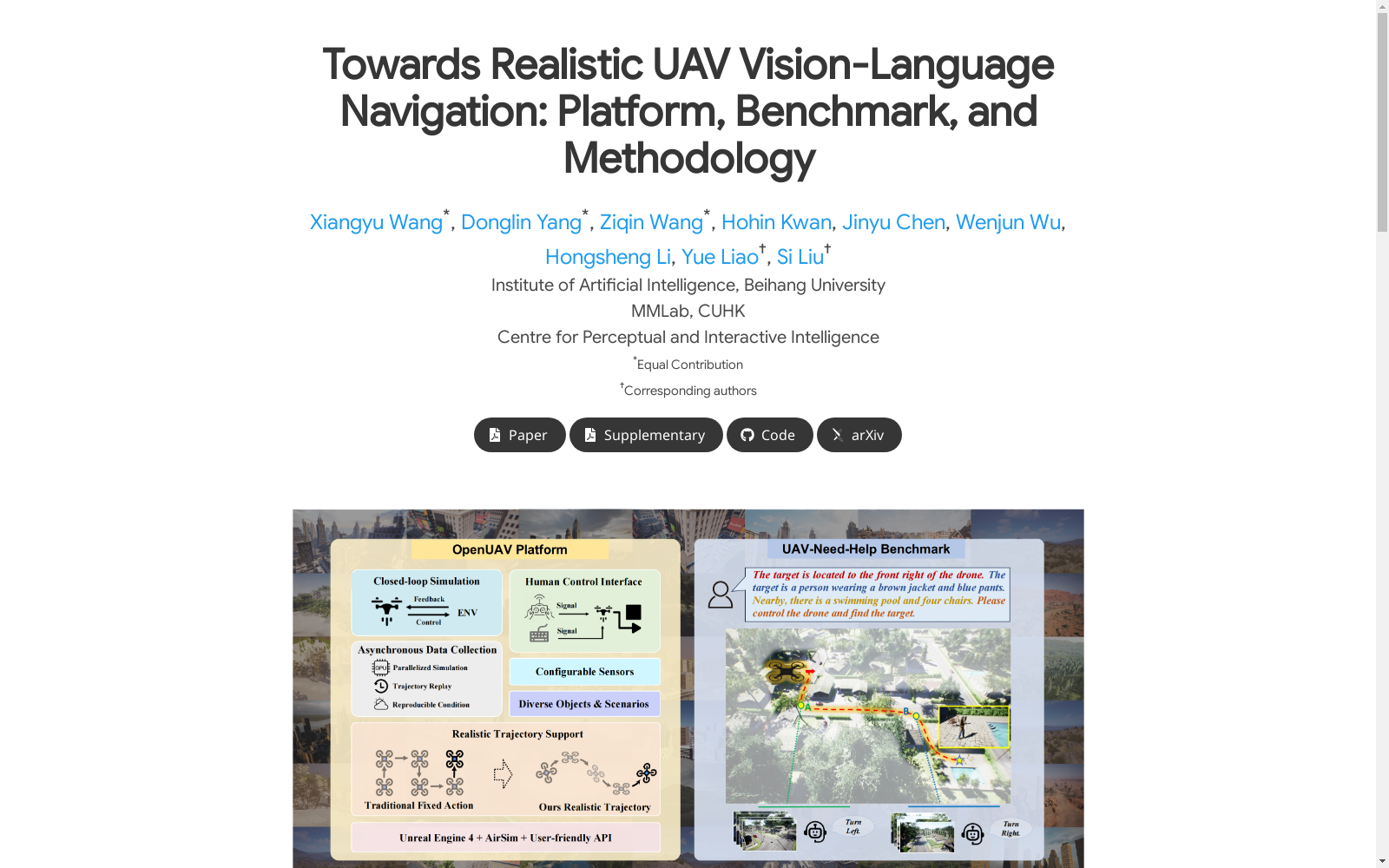
在无人机视觉语言导航(VLN)领域,OpenUAV数据集的最新研究方向主要集中在实现更真实的无人机导航任务。研究者们通过构建OpenUAV平台,结合多样化的环境、真实的飞行控制和广泛的算法支持,推动了无人机VLN任务的现实模拟。此外,研究还引入了UAV-Need-Help基准,通过提供不同级别的辅助信息,帮助无人机在复杂环境中完成目标导向的VLN任务。这些研究不仅提升了无人机在复杂环境中的导航能力,还为将VLN系统应用于实际场景奠定了基础。
相关研究论文
- 1Towards Realistic UAV Vision-Language Navigation: Platform, Benchmark, and Methodology北京航空航天大学人工智能研究所 · 2024年
以上内容由遇见数据集搜集并总结生成


