DexGraspNet
收藏arXiv2023-03-08 更新2024-06-21 收录
下载链接:
https://pku-epic.github.io/DexGraspNet/
下载链接
链接失效反馈官方服务:
资源简介:
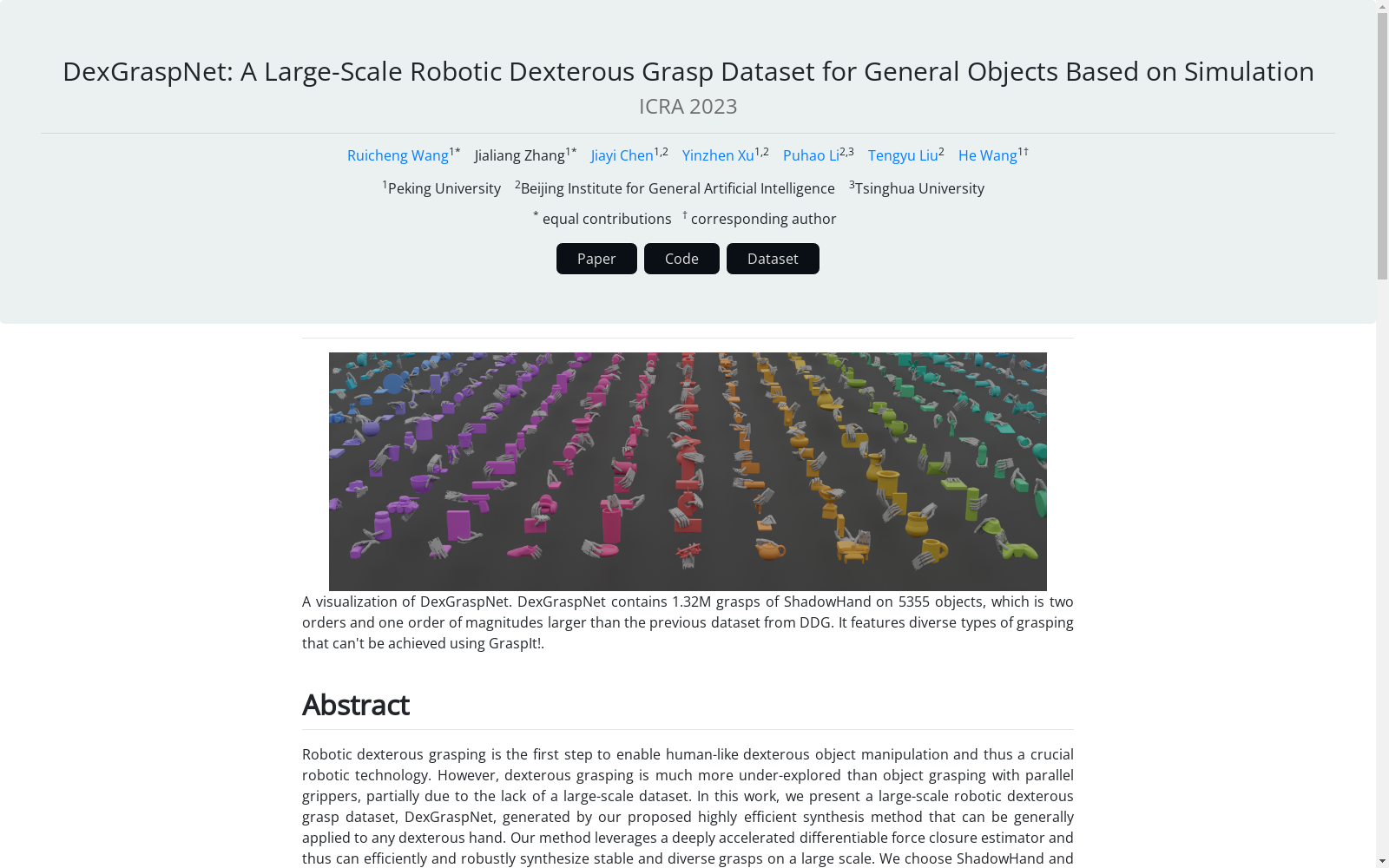
DexGraspNet是由北京大学等机构创建的大规模机器人灵巧抓取数据集,基于模拟技术生成。该数据集包含132万个针对5355个对象的抓取动作,覆盖超过133个对象类别,每个对象实例包含超过200种多样化的抓取动作。数据集的创建过程利用了一种高效的合成方法,通过深度加速的可微力闭合估计器,能够大规模地高效且稳健地合成稳定多样的抓取动作。所有抓取动作均通过Isaac Gym模拟器验证,确保物理稳定性。DexGraspNet的应用领域广泛,旨在解决机器人灵巧抓取技术中的关键问题,提高抓取算法的性能和多样性。
DexGraspNet is a large-scale robotic dexterous grasping dataset developed by Peking University and other institutions, generated via simulation technology. This dataset contains 1.32 million grasping motions targeting 5355 objects, covering over 133 object categories, with each object instance including more than 200 diverse grasping motions. The dataset construction adopts an efficient synthesis approach that leverages a depth-accelerated differentiable force closure estimator, enabling efficient, robust and large-scale synthesis of stable and diverse grasping motions. All grasping motions are validated using the Isaac Gym simulator to guarantee physical stability. DexGraspNet has a wide range of application scenarios, aiming to address key challenges in robotic dexterous grasping technology and improve the performance and diversity of grasping algorithms.
提供机构:
北京大学
创建时间:
2022-10-06
搜集汇总
数据集介绍
构建方式
在机器人灵巧抓取领域,数据集的构建长期受限于合成方法的效率与多样性。DexGraspNet的构建采用了基于优化的高效合成框架,其核心在于对可微分力闭合估计器的深度加速与改进。该方法首先从ShapeNet、YCB等多个来源收集了5355个物体模型,覆盖133个类别,并通过尺度归一化与网格重构进行预处理。针对灵巧手的高自由度特性,研究团队设计了基于凸包膨胀的智能手姿初始化策略,显著提升了优化成功率与收敛速度。同时,创新性地采用反向穿透能量计算,使算法能够处理低质量的薄壁物体网格。最终,通过梯度下降优化结合自穿透与关节限位惩罚项,为每个物体合成超过200个抓取姿态,并全部经过Isaac Gym物理模拟器的稳定性验证,最终形成包含132万抓取的大规模数据集。
特点
DexGraspNet的突出特点体现在其规模、多样性与物理真实性三个维度。作为目前最大的ShadowHand灵巧抓取数据集,其抓取数量达到132万,远超先前同类数据集。多样性方面,通过优化的合成方法摆脱了传统基于GraspIt!方法导致的抓取姿态坍缩问题,手指关节角度分布更为广泛均匀,平均关节熵值更高,体现了灵巧手应有的多自由度表达能力。数据集所有抓取均经过严格的力闭合分析与物理仿真验证,确保了抓取的稳定性与物理可行性。此外,合成框架经过简单适配即可扩展至MANO、Allegro等其他灵巧手模型,展现了良好的通用性。
使用方法
该数据集主要用于数据驱动的灵巧抓取算法训练与评估。研究人员可下载包含物体模型、抓取参数(全局位姿、关节角度)及仿真验证结果的数据。典型使用流程包括:首先,利用数据集训练端到端的抓取生成网络(如DDG),网络以物体深度图像或点云为输入,直接预测手部位姿与关节状态;其次,可基于数据集训练接触预测或隐式表示模型(如GraspTTA),通过优化实现抓取精细化;此外,数据集支持跨数据集基准测试,用于公平比较不同算法的抓取成功率和质量指标(如Q1度量、穿透深度)。数据集的大规模与高多样性为探索抓取泛化能力、少样本学习及仿真到实物的迁移提供了坚实基础。
背景与挑战
背景概述
在机器人灵巧抓取领域,高自由度多指手的精确控制一直是实现类人操作的关键技术。DexGraspNet数据集由北京大学与北京通用人工智能研究院等机构的研究团队于2023年提出,旨在解决现有灵巧抓取数据规模不足、多样性有限的瓶颈。该数据集通过高效的仿真合成方法,为ShadowHand灵巧手模型生成了涵盖5355个物体、超过132万次抓取姿态的大规模数据,覆盖133个物体类别,每个物体实例平均包含200余种抓取变体。其核心研究问题聚焦于如何通过可微分力闭合估计与优化算法,规模化生成物理稳定且姿态多样的灵巧抓取样本,从而推动数据驱动的灵巧抓取算法发展,并为复杂操作任务奠定基础。
当前挑战
DexGraspNet数据集所针对的灵巧抓取问题本身面临高维度姿态空间建模、物理稳定性与多样性平衡等挑战。传统方法如GraspIt!生成的抓取姿态分布狭窄,难以覆盖灵巧手的完整运动能力;而基于优化的合成方法则常受限于成功率低、收敛速度慢以及对物体网格质量敏感等问题。在数据集构建过程中,研究团队需克服薄壁物体网格导致的穿透能量计算失效、初始姿态采样效率低下以及抓取验证的物理仿真开销巨大等具体困难。此外,现有生成方法仍难以涵盖精密抓取与功能性抓取等高级抓取类型,这限制了数据集在复杂操作场景中的泛化能力。
常用场景
经典使用场景
在机器人灵巧抓取领域,DexGraspNet数据集为基于学习的抓取合成方法提供了大规模、高质量的仿真训练基础。该数据集通过高效的优化算法生成了超过132万条抓取姿态,覆盖5355个物体和133个类别,每个物体实例包含超过200种多样化的抓取方式。这些数据经过物理模拟器验证,确保了抓取的稳定性和多样性,使得研究人员能够训练深度神经网络来预测复杂多指手的抓取姿态,从而推动灵巧抓取算法在仿真环境中的性能提升。
衍生相关工作
DexGraspNet数据集催生了一系列围绕灵巧抓取的经典研究工作。例如,基于该数据集训练的DDG和GraspTTA算法在抓取质量和多样性上均展现出显著改进。此外,该数据集的高质量特性激发了后续研究对接触一致性、力闭合优化及多模态抓取生成的探索,相关方法如UniGrasp和ContactGrasp等进一步扩展了灵巧抓取的理论与应用边界,推动了整个领域向更高效、更通用的方向发展。
数据集最近研究
最新研究方向
在机器人灵巧抓取领域,DexGraspNet数据集的推出标志着大规模仿真数据生成技术的重大突破。该数据集通过深度加速的可微分力闭合估计器,高效合成了超过132万次抓取,覆盖5355个物体和133个类别,其规模与多样性远超先前基于GraspIt!的DDG数据集。前沿研究聚焦于利用此类高质量数据训练端到端的抓取合成模型,如DDG和GraspTTA等方法,通过可微分优化与接触一致性推理提升抓取的物理稳定性与多样性。当前热点在于探索如何将仿真数据有效迁移至真实世界,并解决精准抓取与功能化抓取等复杂场景,以推动机器人完成更接近人类水平的灵巧操作任务。这一进展为具身智能与通用机器人操作奠定了关键的数据基础,有望加速服务机器人、工业自动化等领域的实际应用落地。
相关研究论文
- 1DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation北京大学 · 2023年
以上内容由遇见数据集搜集并总结生成


