ROVER
收藏arXiv2024-12-03 更新2024-12-07 收录
下载链接:
https://iis-esslingen.github.io/rover
下载链接
链接失效反馈官方服务:
资源简介:
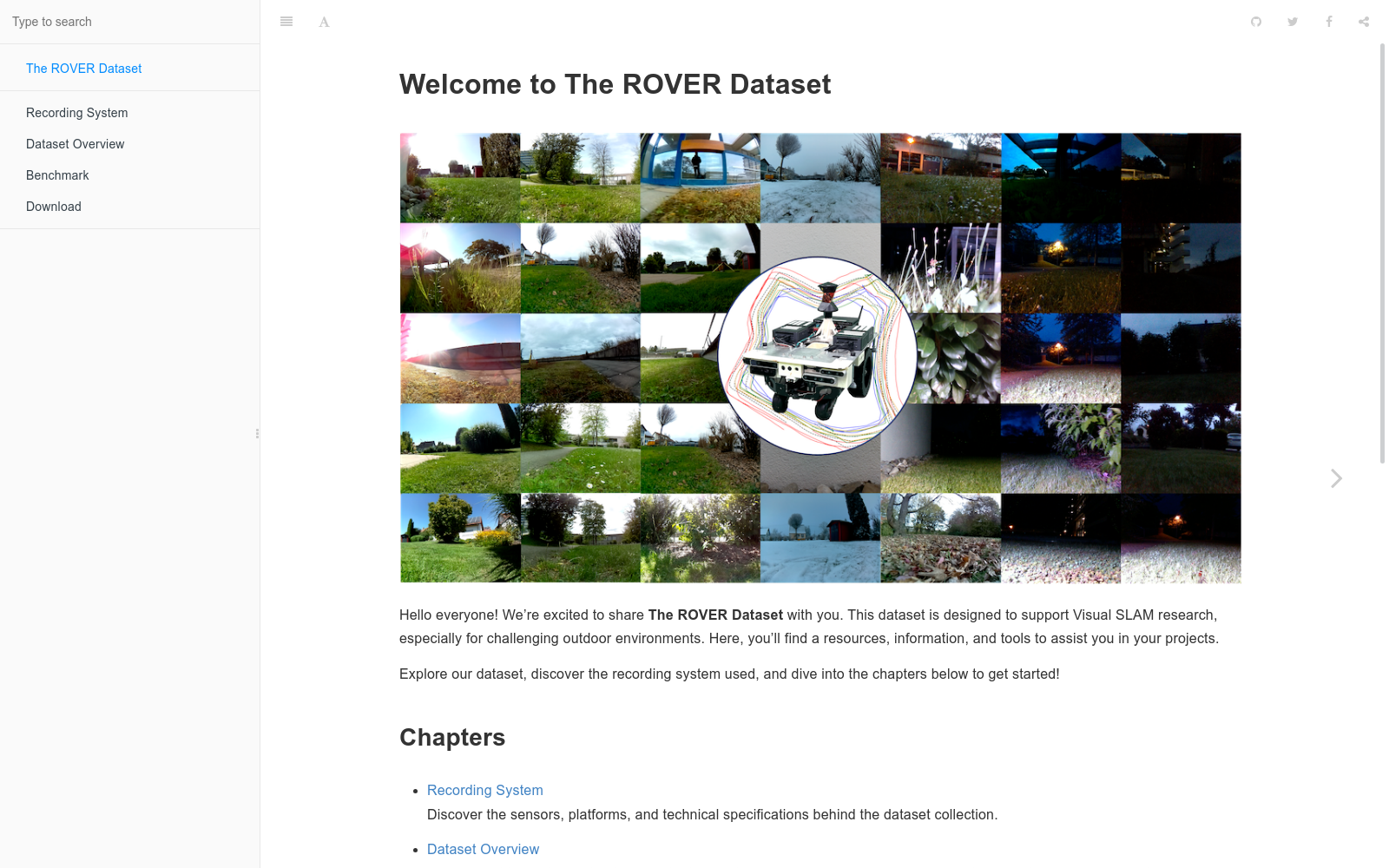
ROVER数据集是一个专为评估视觉SLAM算法在多样自然户外环境中的鲁棒性而设计的综合基准数据集。该数据集由智能系统研究所和弗莱堡大学计算机科学系合作创建,包含39个记录,覆盖了7.2公里的轨迹,数据量约1TB。数据集涵盖了五个户外地点,跨越四季和多种光照条件,包括白天、黄昏和夜晚,以及有无外部照明的情况。数据集通过配备单目、立体和RGB-D相机以及惯性传感器的机器人平台采集,旨在支持视觉和视觉-惯性SLAM算法的评估。ROVER数据集的应用领域包括精准农业、林业和崎岖户外环境中的自主导航,旨在解决在这些复杂环境中长期定位和建图的挑战。
The ROVER dataset is a comprehensive benchmark specifically designed to evaluate the robustness of visual SLAM algorithms across diverse natural outdoor environments. It was collaboratively created by the Institute of Intelligent Systems and the Department of Computer Science, University of Freiburg. The dataset comprises 39 recording sessions, covering a total trajectory of 7.2 kilometers with an overall data volume of approximately 1 TB. It spans five outdoor locations across four seasons and various lighting conditions, including daytime, dusk, night, as well as scenarios with and without external illumination. The data was collected using a robotic platform equipped with monocular, stereo, RGB-D cameras and inertial sensors, aiming to support the evaluation of visual and visual-inertial SLAM algorithms. The ROVER dataset has applications in precision agriculture, forestry and autonomous navigation in rugged outdoor environments, and is intended to address the challenges of long-term localization and mapping in these complex environments.
提供机构:
智能系统研究所,埃斯林根应用科学大学,弗莱堡大学计算机科学系
创建时间:
2024-12-03
搜集汇总
数据集介绍
构建方式
ROVER数据集通过配备多种传感器的机器人平台进行构建,包括单目、立体和RGB-D摄像头,以及惯性传感器。数据集涵盖了39次记录,跨越五个户外地点,采集了四季和多种光照条件下的数据,总轨迹长度超过7.2公里,持续时间达311分钟,原始数据量约1TB。数据集的构建旨在评估视觉SLAM算法在多样化和动态环境中的性能,特别是季节变化、光照条件和密集植被等挑战性因素。
使用方法
ROVER数据集适用于评估和开发视觉SLAM算法,特别是在自然和半结构化户外环境中的应用。研究者可以使用该数据集来测试和改进SLAM系统在不同季节、光照条件和植被密度下的鲁棒性和适应性。数据集的多样性和高质量的地面真值数据使其成为研究长期定位和地图构建问题的理想资源。
背景与挑战
背景概述
ROVER数据集由Fabian Schmidt、Constantin Blessing、Markus Enzweiler和Abhinav Valada于2024年创建,旨在解决自然、非结构化环境中视觉同时定位与地图构建(SLAM)的独特挑战。这些环境因频繁的季节变化、多变的照明条件和密集的植被而复杂化,导致传统视觉SLAM算法在结构化城市环境中的性能显著下降。ROVER数据集通过配备单目、立体和RGB-D摄像机以及惯性传感器的机器人平台,覆盖了五个户外地点的39次记录,涵盖了四季和多种照明场景。该数据集不仅评估了多种传统和基于深度学习的SLAM方法,还强调了在动态环境因素影响下的尺度、特征提取和轨迹一致性问题,为户外长期定位和地图构建提供了坚实的基础。
当前挑战
ROVER数据集面临的挑战主要集中在解决自然环境中视觉SLAM的复杂性。首先,季节变化和多变的照明条件对特征提取和匹配提出了高要求,尤其是在低光照和高植被密度的情况下,现有SLAM系统的表现显著下降。其次,数据集构建过程中,确保多传感器数据的时间同步和精确校准是一大技术难题。此外,评估不同SLAM配置在多季节、多天气和多光照条件下的适应性和鲁棒性,需要开发新的评估方法和基准。最后,尽管RGB-D配置在某些条件下表现优异,但如何有效整合惯性数据以提升整体性能仍是一个未解之谜。
常用场景
经典使用场景
ROVER数据集在视觉SLAM(Simultaneous Localization and Mapping)领域中被广泛用于评估和改进算法在多样化和复杂环境中的鲁棒性。该数据集通过在不同季节、光照条件和植被密度下采集的39个记录,涵盖了从白天到夜晚的各种场景,为研究者提供了一个全面的基准。这些数据特别适用于测试视觉SLAM系统在动态环境中的适应性和稳定性,尤其是在低光照和高植被覆盖的挑战性条件下。
解决学术问题
ROVER数据集解决了视觉SLAM在自然和半结构化环境中面临的多个学术研究问题。首先,它填补了现有数据集在季节变化和多光照条件下的空白,帮助研究者理解和改进算法在这些条件下的表现。其次,通过提供高精度的地面真值数据,ROVER促进了SLAM系统在长期定位和地图构建中的准确性和一致性研究。此外,该数据集还推动了对多传感器融合技术的研究,以提高SLAM系统在复杂环境中的鲁棒性和可靠性。
实际应用
ROVER数据集在多个实际应用场景中展示了其价值。例如,在农业机器人中,该数据集可以帮助开发能够在不同季节和天气条件下高效工作的自主导航系统。在林业和公园管理中,ROVER数据集支持开发能够适应植被变化和光照条件变化的机器人系统。此外,该数据集还可用于城市规划和环境监测,通过提供精确的地图和定位信息,支持智能城市和可持续发展的目标。
数据集最近研究
最新研究方向
在视觉同时定位与地图构建(SLAM)领域,ROVER数据集的最新研究方向主要集中在提升算法在多样化和动态环境中的鲁棒性和适应性。研究者们致力于开发能够在不同季节、光照条件和植被密度下稳定运行的SLAM系统。此外,结合深度学习的视觉SLAM方法也在不断发展,以应对传统方法在复杂环境中的局限性。这些研究不仅推动了户外自主导航技术的发展,也为农业、林业等领域的自动化应用提供了坚实的基础。
相关研究论文
- 1ROVER: A Multi-Season Dataset for Visual SLAM智能系统研究所,埃斯林根应用科学大学,弗莱堡大学计算机科学系 · 2024年
以上内容由遇见数据集搜集并总结生成


