ViGiL3D
收藏arXiv2025-01-03 更新2025-01-06 收录
下载链接:
https://3dlg-hcvc.github.io/vigil3d/
下载链接
链接失效反馈官方服务:
资源简介:
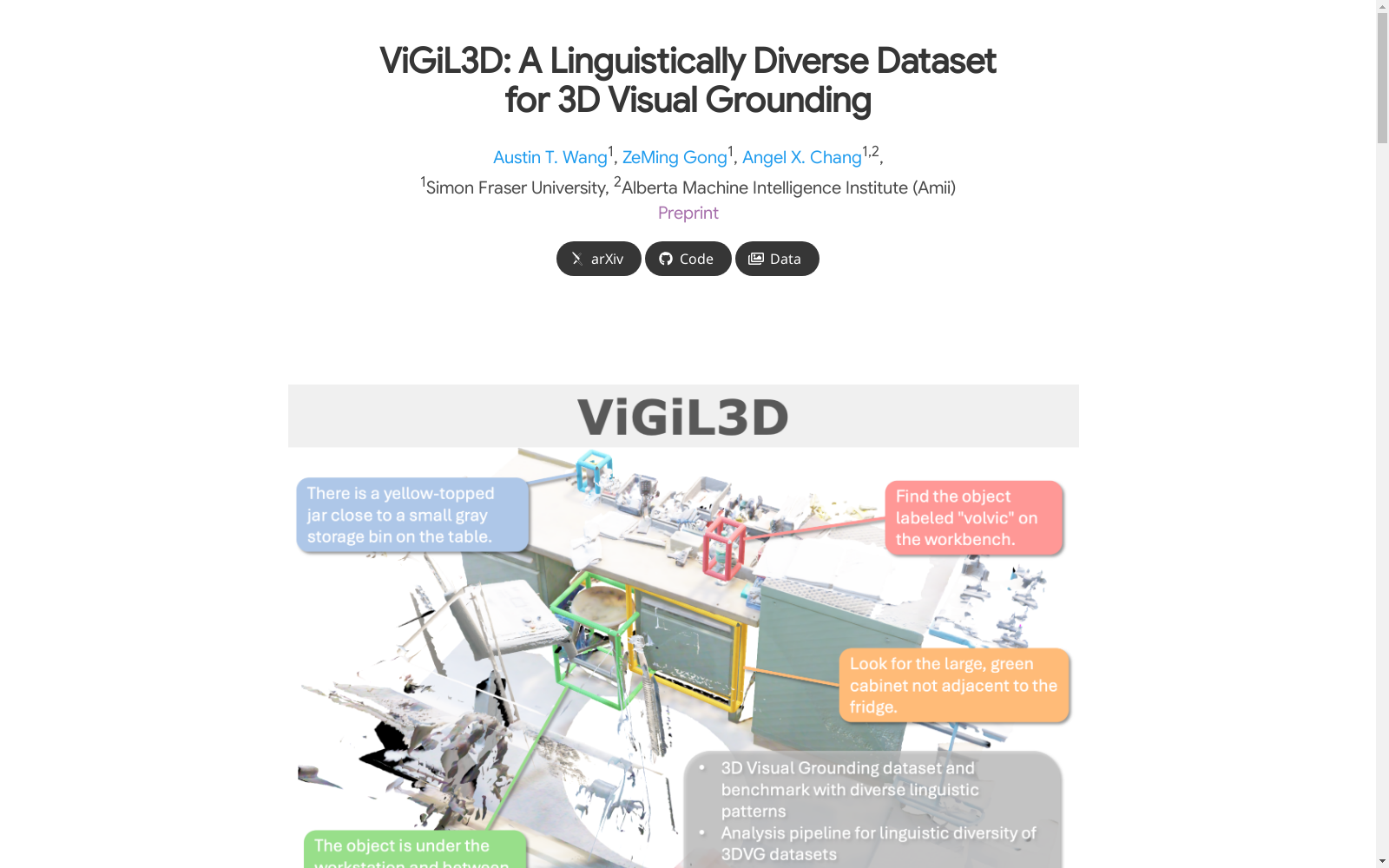
ViGiL3D是由西蒙弗雷泽大学和阿尔伯塔机器智能研究所创建的一个3D视觉定位数据集,旨在通过多样化的语言模式来评估视觉定位方法的性能。该数据集包含350条数据,涵盖了多种语言现象,如否定、指代解析等。数据集的内容包括3D场景和自然语言描述,数据来源为手动标注。ViGiL3D的应用领域包括计算机图形学、机器人学以及虚拟和增强现实助手的对话系统,旨在解决现有3D视觉定位模型在处理多样化语言模式时的不足。
ViGiL3D is a 3D visual grounding dataset developed by Simon Fraser University and the Alberta Machine Intelligence Institute, which aims to evaluate the performance of visual grounding approaches through diverse linguistic patterns. This dataset consists of 350 samples, covering a wide range of linguistic phenomena including negation and reference resolution. Its content comprises 3D scenes and natural language descriptions, with all data manually annotated. The applicable fields of ViGiL3D cover computer graphics, robotics, and dialogue systems for virtual and augmented reality assistants, and it is designed to address the shortcomings of existing 3D visual grounding models when handling diverse linguistic patterns.
提供机构:
西蒙弗雷泽大学, 阿尔伯塔机器智能研究所
创建时间:
2025-01-03
搜集汇总
数据集介绍
构建方式
ViGiL3D数据集的构建基于ScanNet和ScanNet++场景,通过人工标注的方式生成多样化的语言提示。标注者在3D点云和RGB视频的辅助下,选择场景中的目标物体,并编写包含不同语言模式的描述。每个提示都经过精心设计,以确保涵盖广泛的语言现象,如否定、参考解析和复杂句子结构。最终,数据集包含350个提示,覆盖26个场景,旨在全面评估3D视觉定位模型在不同语言模式下的表现。
特点
ViGiL3D数据集的特点在于其语言多样性,涵盖了从粗粒度物体引用到否定、参考解析等多种语言现象。与现有数据集相比,ViGiL3D的提示结构更加复杂,能够更精确地衡量模型在理解多样化语言模式时的表现。此外,数据集中还包含零目标、单目标和多目标的提示,进一步增强了其评估的全面性。这些特点使得ViGiL3D成为一个诊断性数据集,能够揭示现有模型在处理复杂语言提示时的具体优势和不足。
使用方法
ViGiL3D数据集主要用于评估3D视觉定位模型在多样化语言提示下的表现。研究人员可以通过该数据集测试模型在处理否定、复杂关系解析等语言现象时的能力。具体使用方法包括将模型的输出与数据集中提供的目标物体进行对比,计算定位精度和F1分数。此外,数据集还可用于分析模型在不同语言模式下的表现,帮助研究人员识别模型的弱点,并推动模型在真实场景中的应用。
背景与挑战
背景概述
ViGiL3D是由Austin T. Wang、ZeMing Gong和Angel X. Chang等研究人员于2025年提出的一个用于3D视觉定位(3D Visual Grounding, 3DVG)的数据集。该数据集旨在解决现有3DVG数据集在语言多样性上的不足,特别是在处理复杂的、分布外的自然语言提示时的挑战。ViGiL3D基于ScanNet和ScanNet++场景数据,包含了350个提示,涵盖了多种语言现象,如否定、粗粒度对象引用和复杂的关系描述。该数据集的提出为评估3DVG模型在真实世界应用中的表现提供了更为全面的基准。
当前挑战
ViGiL3D面临的挑战主要体现在两个方面。首先,现有3DVG模型在处理复杂的语言提示时表现不佳,尤其是在涉及否定、粗粒度对象引用和复杂关系描述的情况下,模型的表现显著下降。其次,数据集的构建过程中,如何确保语言提示的多样性和代表性是一个重要挑战。现有的数据集往往过于依赖直接和单一的语言模式,而ViGiL3D通过手动标注和精心设计的提示生成框架,确保了语言模式的多样性,但也带来了标注成本高和数据集规模受限的问题。此外,如何将语言理解与3D场景的视觉信息有效结合,仍然是3DVG领域的一个核心挑战。
常用场景
经典使用场景
ViGiL3D数据集主要用于评估3D视觉定位(3DVG)模型在多样化语言模式下的表现。通过提供丰富的语言描述和3D场景数据,ViGiL3D能够测试模型在处理复杂语言提示时的能力,尤其是在涉及否定、粗粒度对象引用和复杂空间关系的情况下。该数据集广泛应用于计算机视觉、机器人学以及虚拟和增强现实助手的对话系统中,帮助模型在真实场景中更准确地定位目标对象。
解决学术问题
ViGiL3D解决了现有3DVG数据集在语言多样性上的不足问题。传统数据集如ScanRefer和Nr3D/Sr3D+主要包含较为单一和直接的语言提示,无法全面评估模型在处理复杂语言模式时的表现。ViGiL3D通过引入多样化的语言模式,如否定、粗粒度对象引用和复杂空间关系,填补了这一空白,使得研究者能够更全面地评估模型的性能,并识别其在处理不同语言现象时的优缺点。
衍生相关工作
ViGiL3D的推出催生了一系列相关研究工作,特别是在3D视觉定位和语言理解领域。基于ViGiL3D,研究者开发了多种新的3DVG模型,如OpenScene、LERF和ZSVG3D,这些模型通过结合大规模语言模型(LLM)和3D场景数据,显著提升了在复杂语言提示下的定位精度。此外,ViGiL3D还推动了3D视觉与语言对齐的研究,为未来的3D基础模型开发提供了重要的数据支持。
以上内容由遇见数据集搜集并总结生成


