SimWorld
收藏Hugging Face2026-01-12 更新2026-01-13 收录
下载链接:
https://huggingface.co/datasets/SimWorld-AI/SimWorld
下载链接
链接失效反馈官方服务:
资源简介:
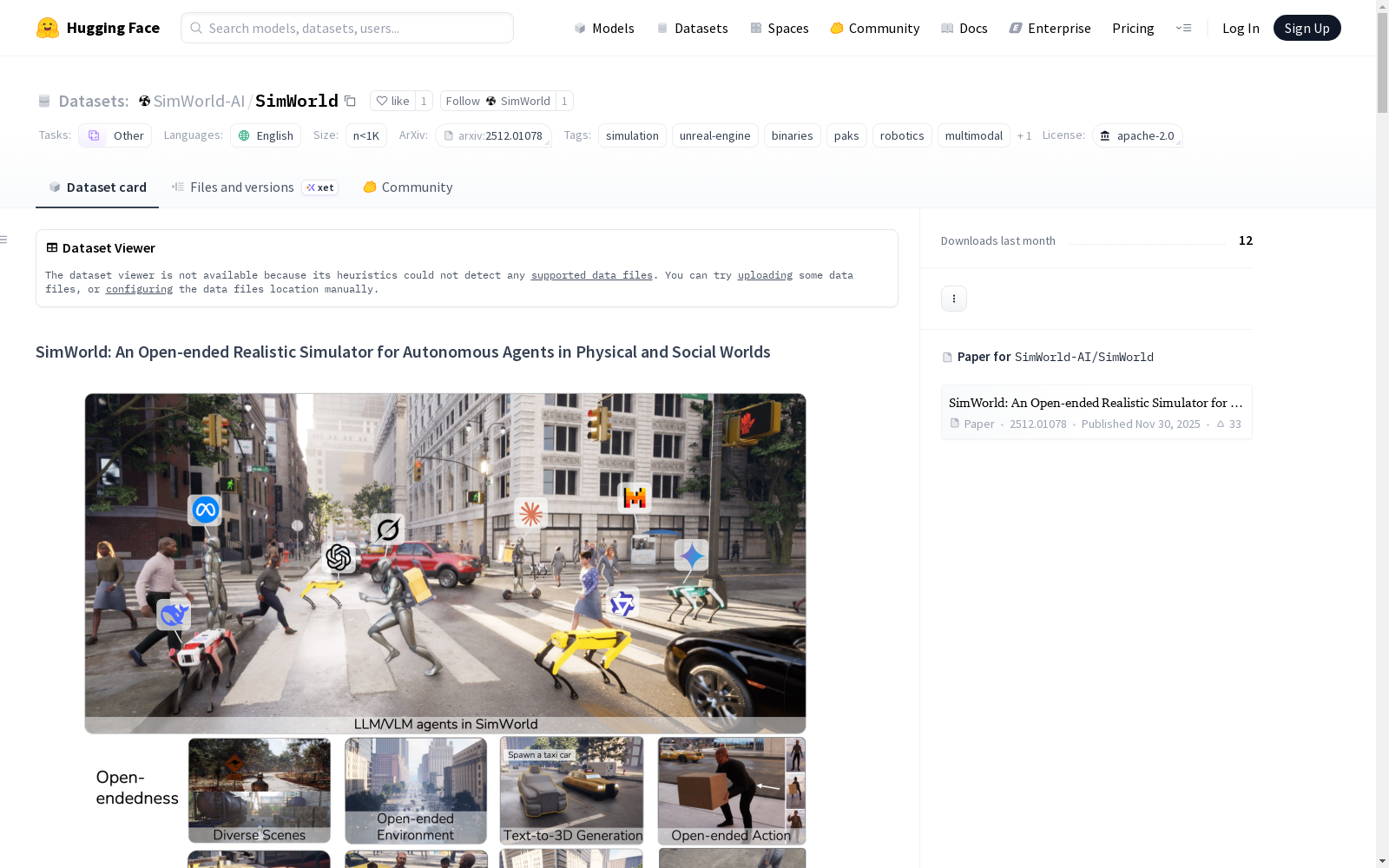
SimWorld是一个基于Unreal Engine 5的模拟平台,专为开发和评估在复杂物理和社会环境中的LLM/VLM AI代理而设计。它提供真实、开放的世界模拟,具有精确的物理和基于语言的程序生成能力。平台支持多模态感知和自然语言动作,适用于多种物理和社交推理场景,如导航、规划和战略合作。数据集包含二进制文件和Pak文件,适用于Windows和Linux平台,分为基础版本和包含100+地图的附加环境版本。
创建时间:
2026-01-11
原始信息汇总
SimWorld 数据集概述
数据集基本信息
- 数据集名称:SimWorld Unreal Backend (Binary + Paks)
- 许可证:Apache 2.0
- 主要语言:英语
- 标签:仿真、虚幻引擎、二进制文件、数据包、机器人技术、多模态、智能体
- 任务类别:其他
- 规模类别:n<1K
数据集简介
SimWorld 是一个用于在复杂物理和社会环境中开发和评估 LLM/VLM AI 智能体的仿真平台。该平台基于 Unreal Engine 5 构建,旨在满足现代智能体开发的核心需求。
核心功能
- 提供具有精确物理特性和基于语言的程序生成功能的逼真、开放式世界仿真。
- 为 LLM/VLM 智能体提供丰富的接口,支持多模态感知和自然语言动作。
- 提供多样化和可定制的物理及社会推理场景,支持对导航、规划和战略协作等复杂智能体行为进行系统性训练和评估。
架构概述
SimWorld 由三层架构组成:
- Unreal Engine 后端:提供多样化和开放式的环境、丰富的资产以及逼真的物理仿真。
- 环境层:支持程序化城市生成、语言驱动的场景编辑、为 LLM/VLM 智能体提供的类 gym API 以及交通仿真。
- 智能体层:使 LLM/VLM 智能体能够基于多模态观察和历史进行推理,同时通过本地动作规划器执行动作。
项目结构
项目主要包含以下目录和组件:
simworld/:Python 包,包含本地规划器、智能体系统、城市生成器、通信器、配置加载器、LLM 基础类、地图系统、交通系统等核心组件。data/:必要的输入数据。config/:示例配置文件与用户配置文件。scripts/:使用示例脚本。docs/:文档源文件。
安装与设置
安装步骤
- Python 客户端:
- 要求 Python 3.10 或更高版本。
- 通过 Git 克隆仓库,创建 Conda 环境,并使用
pip install -e .进行安装。
- UE 服务器:
- 提供适用于 Windows 和 Linux 平台的服务器可执行文件包。
- 提供两个版本:
- 基础版本:包含用于程序化生成的空地图。
- 附加环境版本:提供 100 多个预定义地图(包含空地图)以获得更多样化的仿真场景。
- 下载地址:
- Windows 基础版:https://simworld-release.s3.us-east-1.amazonaws.com/SimWorld-Win64-v0_1_0-Foundation.zip
- Windows 附加环境版:https://simworld-release.s3.us-east-1.amazonaws.com/SimWorld-Win64-v0_1_0-100Maps.zip
- Linux 基础版:https://simworld-release.s3.us-east-1.amazonaws.com/SimWorld-Linux-v0_1_0-Foundation.zip
- Linux 附加环境版:https://simworld-release.s3.us-east-1.amazonaws.com/SimWorld-Linux-v0_1_0-100Maps.zip
快速开始
- 示例代码位于
examples/目录,展示了城市布局生成、交通仿真、资产检索和活动到动作转换等基本功能的使用方法。 - 使用 YAML 格式的配置文件进行系统设置。默认配置文件位于
simworld/config/default.yaml,用户配置模板位于config/example.yaml。
关键特性
- 智能体动作空间:为行人、车辆和机器人提供全面的动作空间。
- 相机与传感器:支持多种传感器,包括 RGB 图像、分割图和深度图像。
- 常用 API:核心 API 位于
simworld/communicator,例如get_camera_observation、spawn_object、spawn_agent、generate_world、clear_env等。
相关资源
- 项目网站:https://simworld-ai.github.io/
- GitHub 仓库:https://github.com/maitrix-org/SimWorld
- 文档:https://simworld.readthedocs.io/en/latest
- 论文:https://arxiv.org/abs/2512.01078
搜集汇总
数据集介绍
构建方式
SimWorld数据集的构建依托于虚幻引擎5的强大仿真能力,通过模块化架构实现物理与社交世界的模拟。其核心构建方式包含三个层次:底层为虚幻引擎后端,提供多样化的开放环境、丰富的资产库以及高保真的物理模拟;中间环境层支持基于语言的城市布局生成、场景编辑以及面向智能体的标准化接口;顶层代理层则整合了多模态感知与历史推理机制,使大型语言模型与视觉语言模型能够通过本地动作规划器执行自然语言指令。这种分层设计确保了仿真平台的灵活性与可扩展性,为具身智能与多智能体研究提供了系统化的数据生成基础。
特点
SimWorld数据集的特点体现在其高度真实与开放式的仿真环境中。该平台不仅具备精确的物理引擎与动态交通模拟,还融入了语言驱动的程序化生成技术,允许研究者根据自然语言描述实时构建与修改虚拟场景。数据集覆盖了行人、车辆及机器人等多种智能体类型,并提供了包括RGB图像、深度图与语义分割在内的多模态传感器数据。此外,SimWorld内置了丰富的预定义场景与自定义配置选项,支持从简单导航到复杂社会协作的多样化任务,为评估智能体在物理交互与社交推理中的表现提供了全面且可复现的基准。
使用方法
使用SimWorld数据集需首先完成平台的环境部署,包括Python客户端的安装与虚幻引擎服务器的配置。研究者可通过提供的Gym风格接口与智能体进行交互,利用通信模块获取多模态观测数据并发送控制指令。数据集支持通过YAML配置文件灵活调整仿真参数,如场景布局、传感器设置与智能体属性。典型的应用流程包括:初始化环境并生成虚拟世界,调用`spawn_agent`方法载入智能体模型,通过`get_camera_observation`等API实时采集感知数据,并基于本地动作规划器将高级语言指令转化为底层控制序列。示例代码与详细文档为快速开展实验与算法验证提供了完整指导。
背景与挑战
背景概述
SimWorld作为一项前沿的仿真平台,由Maitrix等研究机构于2025年正式发布,并迅速在NeurIPS、CVPR等顶级学术会议上获得认可。该平台基于虚幻引擎5构建,旨在为大型语言模型与视觉语言模型驱动的智能体提供一个开放、真实的物理与社会环境模拟测试床。其核心研究问题聚焦于具身智能与多模态代理在复杂动态场景中的感知、推理与决策能力评估,通过高保真的物理引擎与语言驱动的程序化生成技术,为自主导航、社会交互及战略协作等高级认知任务的系统性训练与评测奠定了坚实基础,显著推动了人工智能在仿真与现实世界交互边界的研究进展。
当前挑战
SimWorld致力于解决具身智能领域智能体在开放世界环境中进行鲁棒与泛化行为学习的根本挑战,其核心问题在于如何构建一个既具备高度物理真实性又支持无限场景扩展的仿真环境。在数据集构建过程中,研发团队面临多重技术难题:一是实现大规模、多样化的城市布局与资产库的程序化生成,确保场景的丰富性与可控性;二是设计高效、灵活的多模态接口,以无缝衔接智能体的感知输入与自然语言动作输出;三是维持仿真引擎的实时性能与物理准确性之间的平衡,以支持长期、复杂的交互任务。这些挑战共同指向了构建下一代通用智能体仿真基础设施所必需的技术深度与工程广度。
常用场景
经典使用场景
在具身智能与自主代理的研究领域,SimWorld作为一个基于虚幻引擎5构建的高保真仿真平台,其经典使用场景集中于对大型语言模型与视觉语言模型驱动的智能体进行系统性训练与评估。该平台通过提供开放式的物理与社会环境,支持智能体执行导航、规划、物体操控及战略协作等复杂任务,为研究人员构建了一个可重复、可扩展且高度可控的测试床,用以探索智能体在动态多模态世界中的认知与决策能力。
实际应用
超越纯学术探索,SimWorld在机器人技术、自动驾驶仿真、虚拟培训以及游戏AI开发等实际领域展现出巨大潜力。其高真实度的城市环境与交通模拟能力,可用于测试自动驾驶算法的安全性与鲁棒性;其支持自然语言交互的人类化身代理,则为开发服务于教育、医疗或娱乐的虚拟助手与社交机器人提供了理想的开发与验证平台,加速了前沿AI技术从实验室到产业应用的转化过程。
衍生相关工作
自发布以来,SimWorld已催生并支撑了一系列前沿研究工作。基于其平台,研究者们开展了关于多智能体协作、基于语言的场景编辑与任务生成、以及零样本开放世界导航等主题的深入探索。这些工作不仅验证了平台的能力,也进一步拓展了其在复杂决策、人机交互和持续学习等方向上的应用边界,形成了一个围绕开放式仿真与智能体评估的活跃研究生态。
以上内容由遇见数据集搜集并总结生成


