CoBRA
收藏arXiv2024-03-21 更新2024-07-23 收录
下载链接:
https://cobra.cps.cit.tum.de/
下载链接
链接失效反馈官方服务:
资源简介:
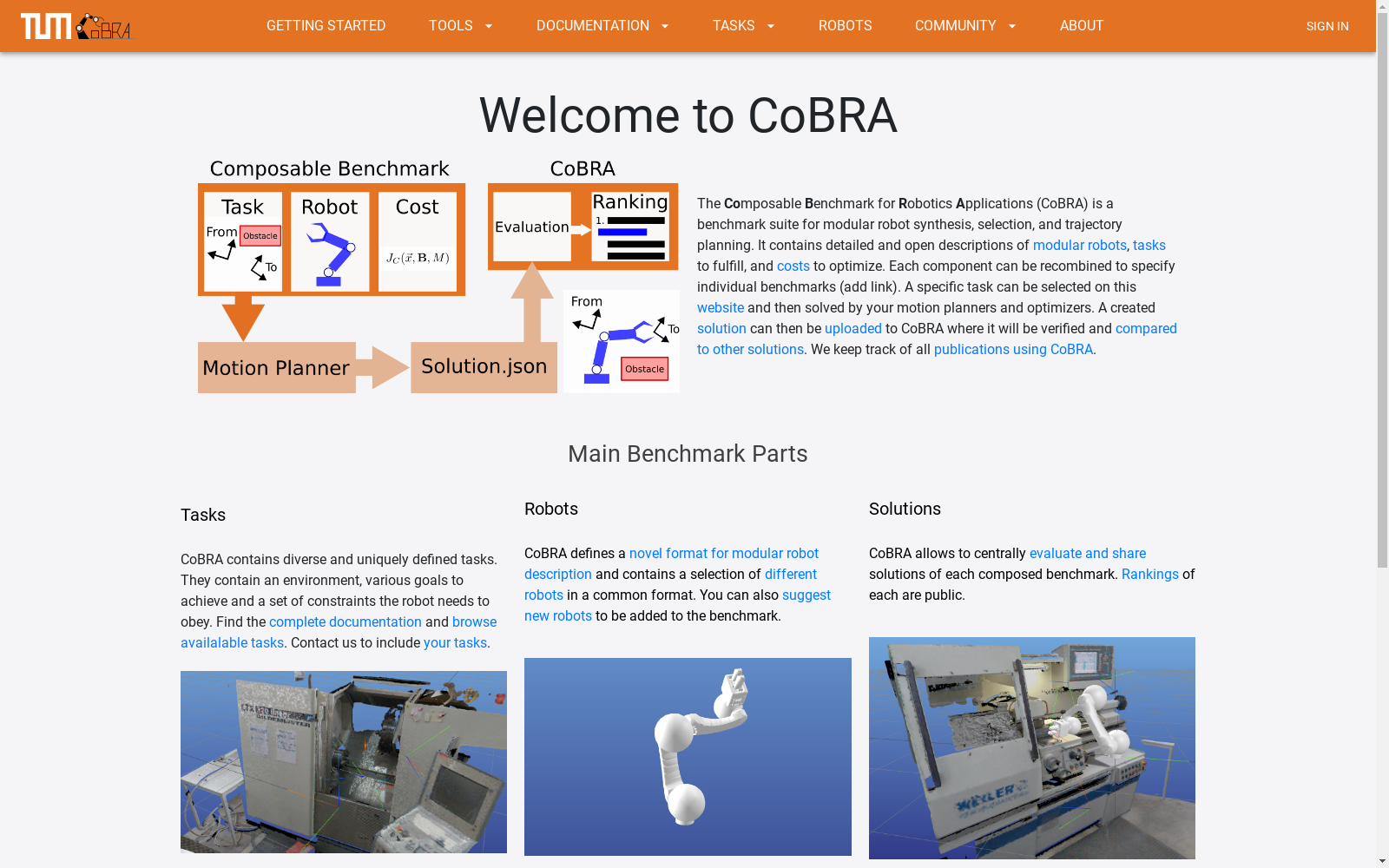
CoBRA是一个专为机器人应用设计的可组合基准套件,由慕尼黑工业大学开发。该数据集包含合成环境和真实世界机器车间的3D扫描,涵盖了机器看护和焊接等任务。数据集通过统一的格式描述机器人、环境和任务,特别适用于模块化机器人,支持多种机器人组合和参数优化。CoBRA旨在评估和比较机器人选择、合成和编程,适用于工业环境中已知和受控的任务,如自动化制造。
CoBRA is a composable benchmark suite specifically designed for robotic applications, developed by the Technical University of Munich. This dataset includes 3D scans of both synthetic environments and real-world machine shops, covering tasks such as machine tending and welding. It describes robots, environments and tasks in a unified format, and is particularly suitable for modular robots, supporting multiple robot configurations and parameter optimization. CoBRA aims to evaluate and compare robot selection, composition and programming, and is applicable to known and controlled tasks in industrial settings such as automated manufacturing.
提供机构:
慕尼黑工业大学
创建时间:
2022-03-17
搜集汇总
数据集介绍
构建方式
CoBRA数据集通过整合机器人、环境和任务描述的统一格式,构建了一个用于评估机器人应用的基准套件。该数据集特别适用于模块化机器人,涵盖了从机器看护到焊接等多种任务,并在合成环境和真实世界的3D扫描环境中进行测试。所有基准任务均可通过cobra.cps.cit.tum.de平台访问,该平台支持任务、机器人模型和解决方案的共享、引用和比较。
特点
CoBRA数据集的主要特点包括其可组合性、代表性和可移植性。数据集将每个基准任务分解为机器人模型、任务和成本函数等组件,允许用户通过重新组合这些组件来创建新的基准任务。此外,数据集包含了真实的3D环境和手工设计的任务,涵盖了工业机器人常见的多种任务。所有组件均以JSON格式描述,确保了跨平台和编程语言的兼容性。
使用方法
CoBRA数据集的使用方法包括通过cobra.cps.cit.tum.de平台访问和下载基准任务、机器人模型和解决方案。用户可以根据任务需求选择合适的机器人模块、成本函数和任务描述,进行机器人选择、合成和编程的测试。数据集支持多种优化方法的比较,用户可以通过提交解决方案来验证其性能,并与其他解决方案进行对比。
背景与挑战
背景概述
CoBRA数据集由慕尼黑工业大学机器人、人工智能与实时系统研究所的Matthias Mayer、Jonathan Külz和Matthias Althoff于2024年提出,旨在解决机器人应用中的组合优化问题。该数据集的核心研究问题是如何为给定任务自动选择最优的机器人、基座姿态和轨迹,而非依赖人工经验或试错法。CoBRA通过提供统一的机器人、环境和任务描述格式,特别适用于模块化机器人,因为模块化机器人可以组装成多种形态,增加了优化参数的复杂性。数据集包括了如机床操作和焊接等任务,涵盖了合成环境和真实世界工厂的3D扫描数据。CoBRA的推出填补了机器人领域中针对特定任务评估最优机器人或模块化机器人组装的空白,推动了机器人优化与自动化领域的研究进展。
当前挑战
CoBRA数据集面临的挑战主要集中在两个方面。首先,模块化机器人的多样性带来了复杂的优化问题,如何从数百万种可能的机器人组合中找到最优解是一个巨大的挑战。其次,构建过程中需要处理复杂的任务描述和环境建模,确保任务的多样性和代表性,同时保证数据集的可扩展性和可移植性。此外,如何在已知且受控的环境中进行机器人组装的评估,同时避免引入感知和环境反应的复杂性,也是该数据集需要克服的技术难题。
常用场景
经典使用场景
CoBRA数据集的经典使用场景主要集中在机器人任务的自动化优化上,特别是在工业环境中。该数据集通过提供统一的机器人模型、环境和任务描述格式,支持对机器人选择、基座姿态和轨迹的自动优化。例如,在机器看护和焊接等任务中,CoBRA能够帮助研究人员和工程师评估不同机器人配置的性能,从而选择最优的机器人组合。
实际应用
在实际应用中,CoBRA数据集广泛应用于工业机器人系统的优化和自动化任务中。例如,在制造业中,CoBRA可以帮助企业选择最适合特定任务的机器人配置,从而提高生产效率和降低成本。此外,CoBRA还支持在3D扫描的真实工厂环境中进行机器人任务的模拟和优化,确保机器人系统在实际部署中的可靠性和高效性。
衍生相关工作
CoBRA数据集的推出激发了大量相关研究工作,特别是在模块化机器人优化和自动化任务规划领域。例如,基于CoBRA的研究人员开发了新的优化算法,如结合层次消除和运动学约束的方法,以及使用强化学习进行模块化机器人设计合成。此外,CoBRA还促进了机器人任务描述和成本函数的标准化,推动了机器人领域的进一步发展。
以上内容由遇见数据集搜集并总结生成


