trajectories
收藏Hugging Face2025-05-18 更新2025-05-19 收录
下载链接:
https://huggingface.co/datasets/EgoWalk/trajectories
下载链接
链接失效反馈官方服务:
资源简介:
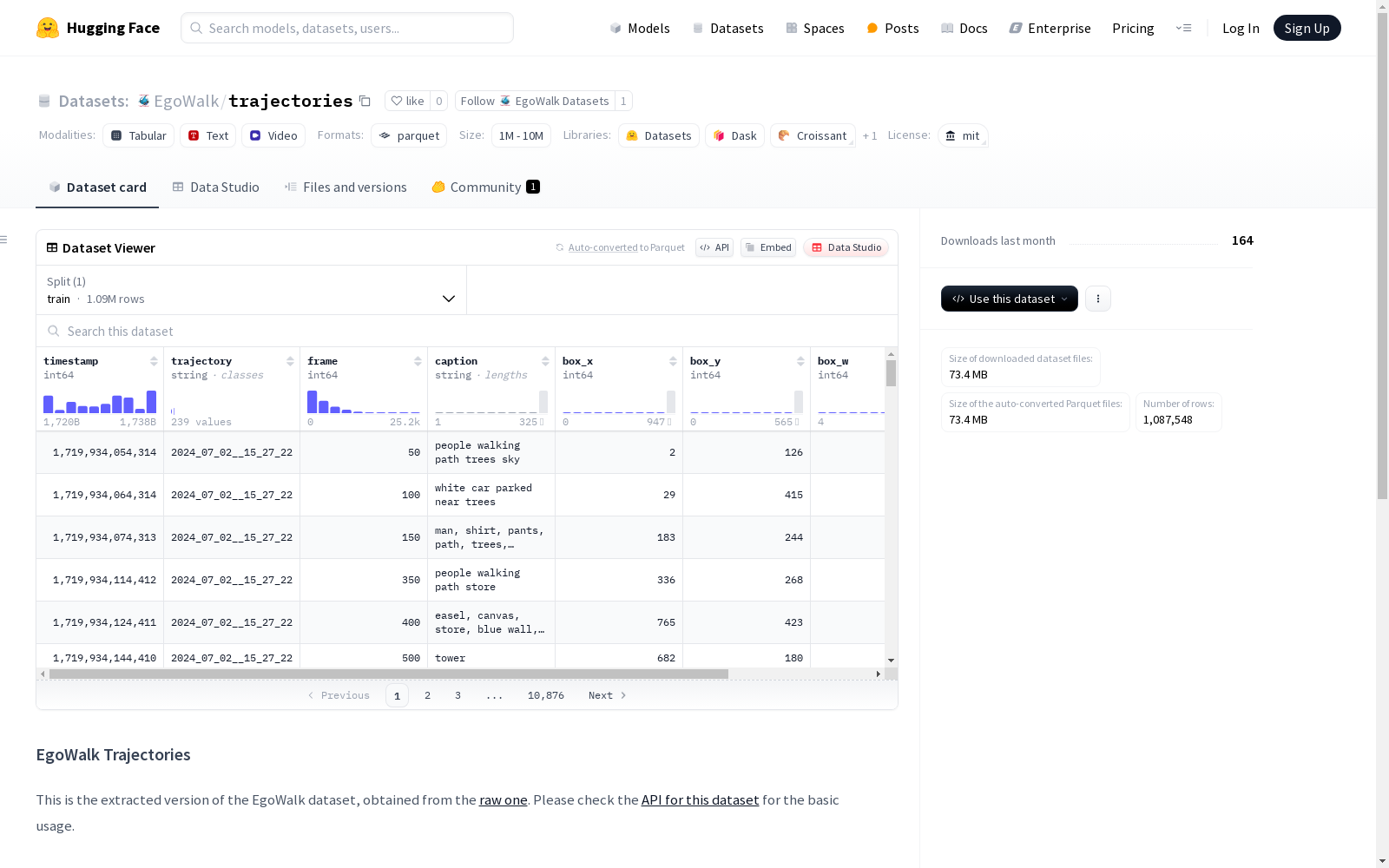
EgoWalk轨迹数据集是一个从原始数据集中提取的版本,主要包含按照帧进行注释的CSV文件、视频文件、语言目标注释以及额外的元数据信息。数据集包含两个版本的注释:完整版和简略版。用于计算轨迹的测距数据存在不完美之处,可能导致定位失败或重新初始化。
The EgoWalk trajectory dataset is an extracted variant sourced from a raw dataset. It primarily contains frame-wise annotated CSV files, video files, linguistic target annotations, and supplementary metadata. The dataset provides two annotation versions: full version and simplified version. The ranging data employed for trajectory computation is imperfect, which may result in localization failures or reinitialization.
创建时间:
2025-05-10
原始信息汇总
EgoWalk Trajectories 数据集概述
基本信息
- 许可证: MIT
- 来源: 从原始数据集EgoWalk/traverse提取而来
- API文档: egowalk-dataset GitHub仓库
数据组织结构
主要目录
-
data
- 包含每帧的主要注释CSV文件
- 字段包括: 视频名称、帧索引、UTC时间戳、相机位姿(可能为
null)
-
video
- 包含data目录引用的视频文件
- 编码方式:
- RGB通道: 有损编码
- Depth通道: 无损编码
-
annotations
- 包含选定帧的语言目标注释
- 提供两个版本:
- normal: 主版本
- brief: 更简洁的句子版本
-
meta
- 包含附加元数据:
- 近似相机高度
- 相机参数
- 轨迹列表等
- 包含附加元数据:
里程计注意事项
搜集汇总
数据集介绍
构建方式
EgoWalk Trajectories数据集通过先进的ZED SDK技术从原始数据中提取运动轨迹信息,构建过程涉及多模态数据的系统化整合。数据以结构化目录组织,包含视频帧注释、视频文件、语言目标标注及元数据四大核心模块,其中相机位姿数据采用严格的时间戳对齐机制,并针对里程计失效情况设计了特殊处理方案。
特点
该数据集显著特点在于其多模态特性与真实场景的精确映射,不仅提供带时间戳的相机位姿信息,还包含经过专业标注的语言目标描述。视频数据采用RGB通道有损压缩与Depth通道无损压缩的混合编码策略,确保数据质量与存储效率的平衡。针对里程计可能出现的失效问题,数据集特别标注了空值情况及重新初始化事件,为研究者提供了完整的误差分析基础。
使用方法
使用者可通过官方提供的API接口高效访问数据集各模块,其中包含专门设计的轨迹切割工具处理里程计异常情况。研究应用时需注意区分常规标注与精简标注两个版本的语言目标数据,并参考元数据中的相机参数及高度信息进行数据校准。视频文件与注释数据的交叉引用机制要求使用者保持原始目录结构以确保数据关联完整性。
背景与挑战
背景概述
EgoWalk Trajectories数据集由EgoWalk团队开发,旨在为第一人称视角(Egocentric Vision)的轨迹分析与导航研究提供高质量的数据支持。该数据集基于ZED SDK进行视觉里程计计算,包含丰富的视频帧注释、相机位姿数据以及语言目标标注,为研究者在视觉定位、路径规划和人机交互等领域的探索提供了重要资源。其多模态数据结构和详尽的元信息设计,显著推动了以自我为中心视角的移动行为理解研究。
当前挑战
该数据集面临的核心挑战体现在两个方面:在领域问题层面,视觉里程计固有的误差积累问题导致部分帧位姿数据缺失或异常,这对轨迹连续性建模和导航精度提出了更高要求;在构建过程中,多传感器数据的时间同步、大规模视频流的高效压缩存储(RGB有损/Depth无损编码),以及人工标注语义目标时保持描述一致性与简洁性的平衡,均是技术实现中需要克服的关键难点。
常用场景
经典使用场景
在计算机视觉与机器人导航领域,EgoWalk Trajectories数据集为研究者提供了丰富的第一人称视角轨迹数据。该数据集通过记录行走过程中的视频帧、时间戳及相机位姿,成为开发视觉里程计(Visual Odometry)和同步定位与地图构建(SLAM)算法的理想测试平台。其多模态特性允许研究者同时利用RGB图像和深度信息进行跨模态分析,特别适用于复杂环境下的路径预测研究。
实际应用
在实际应用中,该数据集支撑了增强现实(AR)设备的空间感知能力优化。基于其轨迹数据开发的算法已应用于室内导航系统,通过理解用户移动模式提升定位鲁棒性。医疗康复领域则利用其步态分析数据设计辅助行走设备,而零售行业借助其视觉定位特性开发智能购物引导系统。
衍生相关工作
该数据集催生了多个里程碑式研究,如《EGO-Nav》提出的分层规划框架利用其语言标注实现了目标导向导航。后续工作《ViTAL》创新性地融合其视觉与惯性数据,建立了端到端的位姿估计模型。在跨模态学习方向,衍生研究《LangWalk》构建了视觉轨迹与自然语言描述的联合嵌入空间,推动了人机交互技术的发展。
以上内容由遇见数据集搜集并总结生成


